@range4200t
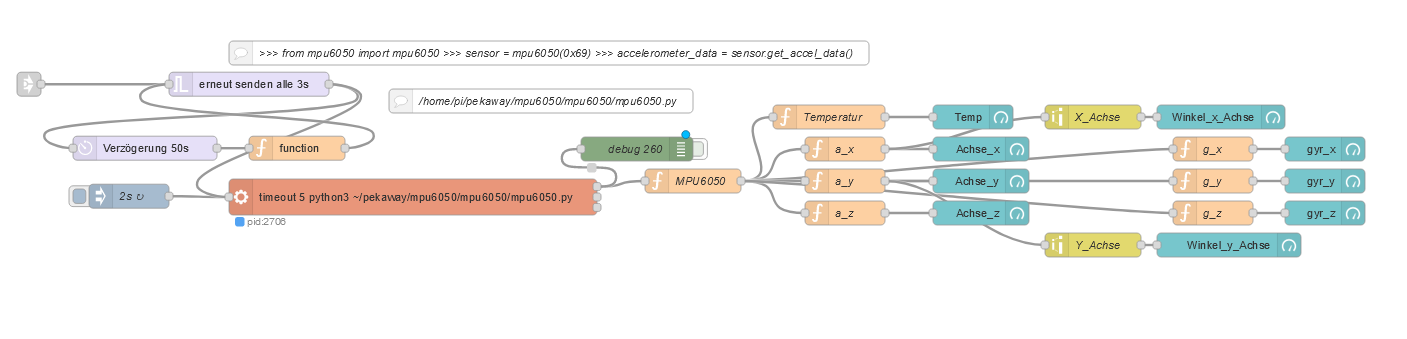
Ich habe hier auch angefangen den MPU6050 als Wasserwaage für das Fahrzeug zu Programmieren
Die ersten Schritte habe ich von hier genommen.
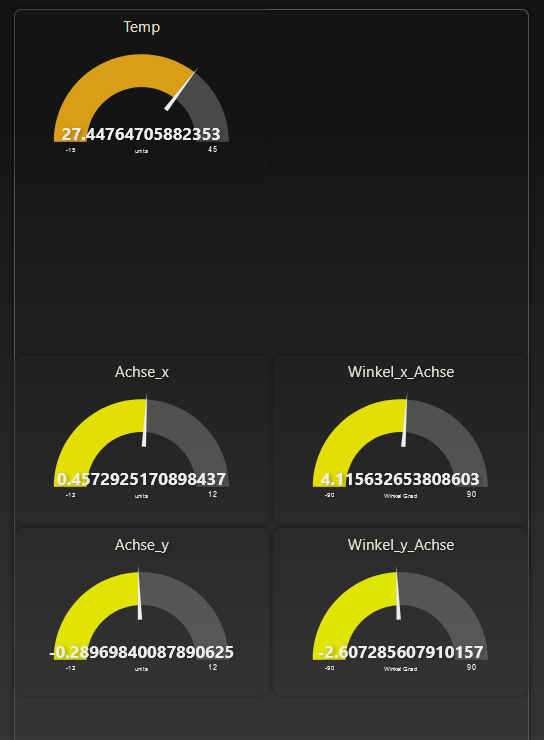
Aus den Zahlen die der MPU für die X und Y Achse auswirft habe ich dann den Winkel ermittelt.
Anhand der Winkel, und dem Abstand zu den Rädern, habe ich die Höhe der Unterlegkeile berechnet. Dazu muss man den Achsabstand, die Spurbreite, den Abstand vom Sensor zur Vorderachse, und den Abstand zum rechten Vorderrad angeben.
Einen Teil habe ich von Sven geklaut  danke Sven.
danke Sven.
Und zwar den Bereich mit dem bewegenden Bild, allerdings habe ich 2 Bilder (png) im Ordner Pekaway abgelegt, auf die ich zugreife, diese müssen mit eine Bas64 Node dekodiert werden. Für die Größe muss das Bild vorher skaliert werden. Das habe ich mit Paint 3D gemacht. Bild Hinten wurde in meinem Fall auf 215x209 und Bild Seite auf 227x121 skaliert.
Ob die Berechnungen so stimmen konnte ich noch nicht ermitteln.
(Als Winkelfunktion und Dreiecksberechnung in der Schule dran waren war ich Krank )
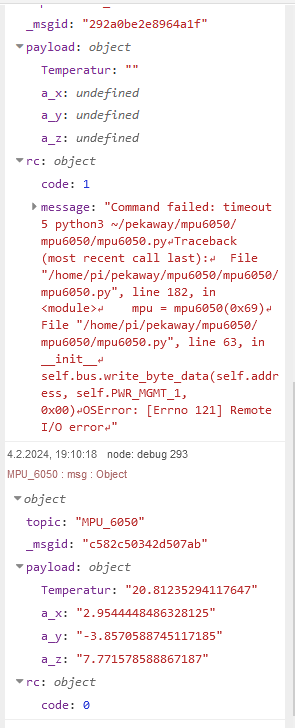
Da der MPU alle paar Messungen einen Fehler rausgibt,
und das System dadurch ins Schwanken kommt, habe ich jetzt einige Zeit damit verbracht das abzufangen. Habs aber nicht geschafft. In dem Python Skript habe ich alles gelöscht was gyro heißt, dadurch hat sich die Fehlermeldung halbiert, aber das bringt am Ergebnis auch nixs.
Von Maik habe ich seinen MPU6050 bekommen, zum Ausprobieren ob es an meinem MPU liegt, aber bei dem kommen die Fehlauslesungen genauso.
Hat irgendeiner eine Idee wie man den Fehler abfangen kann???
Ich versuche das demnächst mit einem ESP8266, weil die Berechnungen kann man ja übernehmen.
Anbei der Flow, vielleicht hat jemand Lust mit zu entwickeln.
[{"id":"9eb3a65e14800d8b","type":"function","z":"08b1222770f25950","name":"Temperatur","func":"msg.payload = msg.payload.Temperatur;\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1090,"y":1940,"wires":[["677c961b2e09b812"]]},{"id":"f08830d1d56c09cc","type":"function","z":"08b1222770f25950","name":"MPU6050","func":"//msg.payload = msg.payload.toString();\nmsg.payload = msg.payload.split(\"\\n\");\n\nmsg.payload = {\n \"Temperatur\": msg.payload[0],\n \"a_x\": msg.payload[1],\n \"a_y\": msg.payload[2],\n \"a_z\": msg.payload[3],\n /* \"g_x\": msg.payload[4],\n \"g_y\": msg.payload[5],\n \"g_z\": msg.payload[6],*/\n \n \n}\n\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":820,"y":2040,"wires":[["9eb3a65e14800d8b","dc1482e13676e504","e748119ed232c04b","ac9f3001d534e0ca","9e4a1b5130d1b1a8"]]},{"id":"677c961b2e09b812","type":"smooth","z":"08b1222770f25950","name":"","property":"payload","action":"mean","count":"5","round":"1","mult":"single","reduce":false,"x":1280,"y":1940,"wires":[["e7da0f7722dc011e"]]},{"id":"cfdcb33d97e3655c","type":"exec","z":"08b1222770f25950","command":"timeout 5 python3 ~/pekaway/mpu6050/mpu6050/mpu6050.py","addpay":"","append":"","useSpawn":"false","timer":"","winHide":false,"oldrc":false,"name":"","x":485,"y":2041,"wires":[["f08830d1d56c09cc","cb7ce55180c8ae09"],[],[]]},{"id":"e849547aed6c020b","type":"function","z":"08b1222770f25950","name":"a_x","func":"msg.payload = msg.payload.a_x;\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":750,"y":1740,"wires":[[]]},{"id":"dc1482e13676e504","type":"function","z":"08b1222770f25950","name":"a_y","func":"var a_y = msg.payload.a_y;\nvar a_y_set = global.get(\"a_y\");\n/**/\n msg.payload = a_y;\n return msg","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1030,"y":2020,"wires":[["7b429a29dbf1b9ce"]]},{"id":"e748119ed232c04b","type":"function","z":"08b1222770f25950","name":"a_z","func":"msg.payload = msg.payload.a_z;\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1110,"y":2060,"wires":[["b9af8a8a89fc942d"]]},{"id":"e7da0f7722dc011e","type":"ui_gauge","z":"08b1222770f25950","name":"","group":"23d21b49a929acac","order":1,"width":7,"height":4,"gtype":"gage","title":"Temp","label":"units","format":"{{msg.payload.toFixed(2)}}","min":"-15","max":"45","colors":["#00b500","#e6e600","#ca3838"],"seg1":"","seg2":"","diff":false,"className":"","x":1430,"y":1940,"wires":[]},{"id":"72ea41edbbbba91b","type":"inject","z":"08b1222770f25950","name":"1s","props":[{"p":"payload"},{"p":"topic","vt":"str"}],"repeat":"1","crontab":"","once":true,"onceDelay":"5","topic":"MPU_6050","payload":"","payloadType":"str","x":130,"y":2040,"wires":[["cfdcb33d97e3655c"]]},{"id":"c2d08a8c062b36c0","type":"trigger","z":"08b1222770f25950","name":"","op1":"true","op2":"0","op1type":"bool","op2type":"str","duration":"-3","extend":false,"overrideDelay":false,"units":"s","reset":"","bytopic":"all","topic":"topic","outputs":1,"x":365,"y":1899,"wires":[["a9ae25b17ce47a87","cfdcb33d97e3655c","be3339f7a521b060"]]},{"id":"842efc21bd9fac1b","type":"smooth","z":"08b1222770f25950","name":"","property":"payload","action":"mean","count":"10","round":"10","mult":"single","reduce":false,"x":1280,"y":1980,"wires":[["c50aad2334b166c1","1b0d126e78f290c5","f8c5cc9775eafc0d","b9f19b08c9bf8460"]]},{"id":"7aad7f1d1dc1afe0","type":"smooth","z":"08b1222770f25950","name":"","property":"payload","action":"mean","count":"10","round":"10","mult":"single","reduce":false,"x":1280,"y":2020,"wires":[["b0e7a7353eced4ab","8f7ffcf271181f68","e66b9aeb88fd1ef5"]]},{"id":"b9af8a8a89fc942d","type":"smooth","z":"08b1222770f25950","name":"","property":"payload","action":"mean","count":"2","round":"1","mult":"single","reduce":false,"x":1280,"y":2060,"wires":[["27d2f3fd20d75f6b"]]},{"id":"f052681e8e627523","type":"link in","z":"08b1222770f25950","name":"tempconfigread","links":["822fb891.c1f2b8"],"x":90,"y":1899,"wires":[["c2d08a8c062b36c0"]]},{"id":"cdaede4b11f35558","type":"function","z":"08b1222770f25950","name":"","func":"msg.reset = true; \nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":425,"y":1979,"wires":[["c2d08a8c062b36c0","cd95b63bb23af570"]]},{"id":"a9ae25b17ce47a87","type":"delay","z":"08b1222770f25950","name":"","pauseType":"delay","timeout":"50","timeoutUnits":"seconds","rate":"1","nbRateUnits":"1","rateUnits":"second","randomFirst":"1","randomLast":"5","randomUnits":"seconds","drop":false,"allowrate":false,"outputs":1,"x":235,"y":1979,"wires":[["cdaede4b11f35558"]]},{"id":"be3339f7a521b060","type":"debug","z":"08b1222770f25950","name":"debug 275","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":610,"y":1880,"wires":[]},{"id":"c50aad2334b166c1","type":"ui_gauge","z":"08b1222770f25950","name":"","group":"23d21b49a929acac","order":10,"width":5,"height":4,"gtype":"gage","title":"Achse_x","label":"units","format":"{{msg.payload.toFixed(2)}}","min":"-12","max":"12","colors":["#00b500","#e6e600","#ca3838"],"seg1":"","seg2":"","diff":false,"className":"","x":1420,"y":1980,"wires":[]},{"id":"a99592249b539953","type":"range","z":"08b1222770f25950","minin":"-10.3","maxin":"10.3","minout":"-90","maxout":"90","action":"scale","round":false,"property":"payload","name":"X_Achse","x":1680,"y":1980,"wires":[["7a76a196fd3797fe","5c723aebd8173e18","dc2aeadf25e35680","79e68d1036ce39bb"]]},{"id":"2044747c0c22ad14","type":"range","z":"08b1222770f25950","minin":"-9.7","maxin":"9.7","minout":"-90","maxout":"90","action":"scale","round":false,"property":"payload","name":"Y_Achse","x":1680,"y":2020,"wires":[["fcea39fe80ca68de","9464c8745827e92a","3c588298273aa4eb","3663c4b9d088602a"]]},{"id":"b0e7a7353eced4ab","type":"ui_gauge","z":"08b1222770f25950","name":"","group":"23d21b49a929acac","order":19,"width":5,"height":4,"gtype":"gage","title":"Achse_y","label":"units","format":"{{msg.payload.toFixed(2)}}","min":"-12","max":"12","colors":["#00b500","#e6e600","#ca3838"],"seg1":"","seg2":"","diff":false,"className":"","x":1420,"y":2020,"wires":[]},{"id":"27d2f3fd20d75f6b","type":"ui_gauge","z":"08b1222770f25950","name":"","group":"23d21b49a929acac","order":28,"width":5,"height":4,"gtype":"gage","title":"Achse_z","label":"units","format":"{{value}}","min":"-12","max":"12","colors":["#00b500","#e6e600","#ca3838"],"seg1":"","seg2":"","diff":false,"className":"","x":1420,"y":2060,"wires":[]},{"id":"cd95b63bb23af570","type":"debug","z":"08b1222770f25950","name":"debug 276","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":610,"y":1980,"wires":[]},{"id":"7a76a196fd3797fe","type":"ui_gauge","z":"08b1222770f25950","name":"","group":"23d21b49a929acac","order":3,"width":5,"height":4,"gtype":"gage","title":"Winkel_x_Achse","label":"Winkel Grad","format":"{{msg.payload.toFixed(2)}}","min":"-90","max":"90","colors":["#00b500","#e6e600","#ca3838"],"seg1":"","seg2":"","diff":false,"className":"","x":1840,"y":1980,"wires":[]},{"id":"458e18235afd83ba","type":"function","z":"08b1222770f25950","name":"Tangens","func":"\nvar rad = global.get(\"abstand_rechts\");\nvar winkel = msg.payload;\n//var hoehe = Math.tan(winkel)*rad;\nvar hoehe = Math.tan((winkel * Math.PI) / 180)*rad;\n\nmsg.payload = hoehe\nreturn msg;\n\n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1440,"y":2100,"wires":[["639e2fee6c6a8986"]]},{"id":"fcea39fe80ca68de","type":"ui_gauge","z":"08b1222770f25950","name":"","group":"23d21b49a929acac","order":6,"width":5,"height":4,"gtype":"gage","title":"Winkel_y_Achse","label":"Winkel Grad","format":"{{msg.payload.toFixed(2)}}","min":"-90","max":"90","colors":["#00b500","#e6e600","#ca3838"],"seg1":"","seg2":"","diff":false,"className":"","x":1850,"y":2020,"wires":[]},{"id":"ada8739e87767107","type":"function","z":"08b1222770f25950","name":"Tangens","func":"var achse = global.get(\"Von_Vorder_Achse\");\nvar rad = global.get(\"abstand_vorne\");\nvar winkel = msg.payload;\nvar hoehe = Math.tan((winkel * Math.PI) / 180)*rad;\n\nmsg.payload = hoehe\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1440,"y":2240,"wires":[["8116f9ed1b5eb49c"]]},{"id":"d63cea16236d5966","type":"ui_level","z":"08b1222770f25950","group":"23d21b49a929acac","order":4,"width":1,"height":4,"name":"Rechts","label":"","colorHi":"#e60000","colorWarn":"#ff9900","colorNormal":"#00b33c","colorOff":"#595959","min":0,"max":"30","segWarn":"5","segHigh":"15","unit":" cm__Rechts","layout":"sv","channelA":"","channelB":"","decimals":"2","animations":"soft","shape":2,"colorschema":"fixed","textoptions":"default","colorText":"#eeeeee","fontLabel":"","fontValue":"","fontSmall":"","colorFromTheme":true,"textAnimations":false,"hideValue":false,"tickmode":"off","peakmode":false,"property":"payload","peaktime":3000,"x":1760,"y":2100,"wires":[]},{"id":"00cc4cbe3eee97fd","type":"ui_level","z":"08b1222770f25950","group":"23d21b49a929acac","order":7,"width":1,"height":4,"name":"Vorne","label":"","colorHi":"#e60000","colorWarn":"#ff9900","colorNormal":"#00b33c","colorOff":"#595959","min":0,"max":"30","segWarn":"5","segHigh":"15","unit":" cm__Vorne","layout":"sv","channelA":"","channelB":"","decimals":"2","animations":"soft","shape":2,"colorschema":"fixed","textoptions":"default","colorText":"#eeeeee","fontLabel":"","fontValue":"","fontSmall":"","colorFromTheme":true,"textAnimations":false,"hideValue":false,"tickmode":"off","peakmode":false,"property":"payload","peaktime":3000,"x":1750,"y":2240,"wires":[]},{"id":"0fb42f2eabae7eae","type":"comment","z":"08b1222770f25950","name":"MPU6050","info":"","x":620,"y":1380,"wires":[]},{"id":"00322020898111c4","type":"comment","z":"08b1222770f25950","name":">>> from mpu6050 import mpu6050 >>> sensor = mpu6050(0x69) >>> accelerometer_data = sensor.get_accel_data()","info":">>> from mpu6050 import mpu6050 \n>>> sensor = mpu6050(0x69) \n>>> accelerometer_data = sensor.get_accel_data()","x":740,"y":1860,"wires":[]},{"id":"03c076cd0c5e1343","type":"comment","z":"08b1222770f25950","name":"/home/pi/pekaway/mpu6050/mpu6050/mpu6050.py","info":"","x":730,"y":1920,"wires":[]},{"id":"0e649e7f6eb04528","type":"ui_text_input","z":"08b1222770f25950","name":"","label":"Achsabstand","tooltip":"","group":"b5fe614cebc76e9b","order":1,"width":4,"height":1,"passthru":true,"mode":"number","delay":300,"topic":"topic","sendOnBlur":true,"className":"","topicType":"msg","x":790,"y":1380,"wires":[["d3a1a5a674a6d59c"]]},{"id":"d3a1a5a674a6d59c","type":"function","z":"08b1222770f25950","name":"global set Achsabstand","func":"global.set(\"Achsabstand\", (parseFloat(msg.payload)));\n\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1280,"y":1380,"wires":[["ad1a626ea50b5dba","0e649e7f6eb04528","1b3ee8a07653fac2"]]},{"id":"50fdf511b5bc4d58","type":"ui_text_input","z":"08b1222770f25950","name":"","label":"Radabstand","tooltip":"","group":"b5fe614cebc76e9b","order":3,"width":4,"height":1,"passthru":true,"mode":"number","delay":300,"topic":"topic","sendOnBlur":true,"className":"","topicType":"msg","x":790,"y":1440,"wires":[["52ae58855fcc3316"]]},{"id":"52ae58855fcc3316","type":"function","z":"08b1222770f25950","name":"global set Radabstand","func":"global.set(\"Radabstand\", (parseFloat(msg.payload)));\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1290,"y":1440,"wires":[["3eed25c78f1de3c0","50fdf511b5bc4d58","e0b56f47a7c7bd49"]]},{"id":"4dd9b6f65e25d7c7","type":"function","z":"08b1222770f25950","name":"global set Abstand_VorderAchse","func":"global.set(\"Abstand_VorderAchse\", (parseFloat(msg.payload)));\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1250,"y":1500,"wires":[["1e1f5f4e49f800a1","89136b3294cc9859","d0ce261075309f58"]]},{"id":"89136b3294cc9859","type":"ui_text_input","z":"08b1222770f25950","name":"","label":"Abstand_VorderAchse","tooltip":"","group":"b5fe614cebc76e9b","order":5,"width":4,"height":1,"passthru":true,"mode":"number","delay":300,"topic":"topic","sendOnBlur":true,"className":"","topicType":"msg","x":700,"y":1500,"wires":[["4dd9b6f65e25d7c7"]]},{"id":"8b8adb2a4c2be177","type":"function","z":"08b1222770f25950","name":"global set Radabstand rechtes Vorderrad","func":"global.set(\"abstand-vorne_rechts\", (parseFloat(msg.payload)));\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1290,"y":1560,"wires":[["8e63b1f2bc0b1062","b399b35da7551506","a686b2a46415c242"]]},{"id":"b399b35da7551506","type":"ui_text_input","z":"08b1222770f25950","name":"Abstand_v_R","label":"Abstand_v_R","tooltip":"","group":"b5fe614cebc76e9b","order":7,"width":4,"height":1,"passthru":true,"mode":"number","delay":"3000","topic":"topic","sendOnBlur":true,"className":"","topicType":"msg","x":740,"y":1560,"wires":[["8b8adb2a4c2be177"]]},{"id":"af09420a71549e48","type":"function","z":"08b1222770f25950","name":"Abstand hinten","func":"var aa = global.get(\"Achsabstand\");\nvar av = global.get(\"Abstand_VorderAchse\");\nvar hinten = aa-av;\n\nmsg.payload = hinten;\nglobal.set(\"abstand_hinten\", (parseFloat(msg.payload)));\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1020,"y":1620,"wires":[["5fe2f2cea23b5899","79cf590f61e18514"]]},{"id":"e780b0c92a72b918","type":"function","z":"08b1222770f25950","name":"Abstand vorne","func":"\nvar av = global.get(\"Abstand_VorderAchse\");\n\n\nmsg.payload = av;\nglobal.set(\"abstand_vorne\", (parseFloat(msg.payload)));\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1020,"y":1660,"wires":[["c12eca9fbe56c8b9","3d1eddeb9b0a7b7b"]]},{"id":"c90778209d9a88ce","type":"function","z":"08b1222770f25950","name":"Abstand rechts","func":"\nvar av = global.get(\"abstand-vorne_rechts\");\n\nmsg.payload = av;\nglobal.set(\"abstand_rechts\", (parseFloat(msg.payload)));\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1020,"y":1740,"wires":[["0e9d4e8a9cce92c3","df08a68b0d0c9b51"]]},{"id":"6d9dc2db298fe7c3","type":"function","z":"08b1222770f25950","name":"Abstand links","func":"var aa = global.get(\"abstand-vorne_rechts\");\nvar ah = global.get(\"Radabstand\");\nvar links = ah-aa;\n\nmsg.payload = links;\nglobal.set(\"abstand_links\", (parseFloat(msg.payload)));\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1020,"y":1700,"wires":[["cb10eaca855650df","d9be6254f271c7ee"]]},{"id":"4040928a65a2c779","type":"function","z":"08b1222770f25950","name":"Tangens","func":"var achse = global.get(\"abstand_links\");\nvar rad = global.get (\"Radabstand\");\nvar winkel = msg.payload;\nvar hoehe = Math.tan((winkel * Math.PI) / 180)*rad;\n\nmsg.payload = hoehe\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1440,"y":2160,"wires":[["77a70c32bb9b1454"]]},{"id":"d876b4191a494f25","type":"ui_level","z":"08b1222770f25950","group":"23d21b49a929acac","order":2,"width":1,"height":4,"name":"Links","label":"","colorHi":"#e60000","colorWarn":"#ff9900","colorNormal":"#00b33c","colorOff":"#595959","min":0,"max":"30","segWarn":"5","segHigh":"15","unit":" cm__Links","layout":"sv","channelA":"","channelB":"","decimals":"2","animations":"soft","shape":2,"colorschema":"fixed","textoptions":"default","colorText":"#eeeeee","fontLabel":"","fontValue":"","fontSmall":"","colorFromTheme":true,"textAnimations":false,"hideValue":false,"tickmode":"off","peakmode":false,"property":"payload","peaktime":3000,"x":1750,"y":2160,"wires":[]},{"id":"8f7c47f70debf3bd","type":"function","z":"08b1222770f25950","name":"Tangens","func":"var achse = global.get(\"Von_Vorder_Achse\");\nvar rad = global.get(\"abstand_hinten\");\nvar winkel = msg.payload;\nvar hoehe = Math.tan((winkel * Math.PI) / 180)*rad;\n\nmsg.payload = hoehe\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1440,"y":2300,"wires":[["170981b20d3a15cc"]]},{"id":"4a68f1e1fb889015","type":"ui_level","z":"08b1222770f25950","group":"23d21b49a929acac","order":5,"width":1,"height":4,"name":"Hinten","label":"","colorHi":"#e60000","colorWarn":"#ff9900","colorNormal":"#00b33c","colorOff":"#595959","min":0,"max":"30","segWarn":"5","segHigh":"15","unit":" cm__Hinten","layout":"sv","channelA":"","channelB":"","decimals":"2","animations":"soft","shape":2,"colorschema":"fixed","textoptions":"default","colorText":"#eeeeee","fontLabel":"","fontValue":"","fontSmall":"","colorFromTheme":true,"textAnimations":false,"hideValue":false,"tickmode":"off","peakmode":false,"property":"payload","peaktime":3000,"x":1750,"y":2300,"wires":[]},{"id":"23d1467d31d5a833","type":"inject","z":"08b1222770f25950","name":"","props":[{"p":"payload"},{"p":"topic","vt":"str"}],"repeat":"","crontab":"","once":true,"onceDelay":"10","topic":"","payload":"","payloadType":"str","x":530,"y":1600,"wires":[["af09420a71549e48","e780b0c92a72b918","6d9dc2db298fe7c3","c90778209d9a88ce","8f3e03456b76631d","a15e2d5ef9da6599","7d5da76833dfcc5c","bbe62355bdd3ea59"]]},{"id":"5fe2f2cea23b5899","type":"debug","z":"08b1222770f25950","name":"debug 279","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1390,"y":1620,"wires":[]},{"id":"c12eca9fbe56c8b9","type":"debug","z":"08b1222770f25950","name":"debug 280","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1390,"y":1660,"wires":[]},{"id":"cb10eaca855650df","type":"debug","z":"08b1222770f25950","name":"debug 281","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1390,"y":1700,"wires":[]},{"id":"0e9d4e8a9cce92c3","type":"debug","z":"08b1222770f25950","name":"debug 282","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1390,"y":1740,"wires":[]},{"id":"2a8b20db4cb3e611","type":"debug","z":"08b1222770f25950","name":"debug 283","active":true,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":2000,"y":1380,"wires":[]},{"id":"d473c578d18589d6","type":"debug","z":"08b1222770f25950","name":"debug 284","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":2000,"y":1440,"wires":[]},{"id":"a6c405f7611d8599","type":"debug","z":"08b1222770f25950","name":"debug 285","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":2000,"y":1500,"wires":[]},{"id":"279ed7ad902e19e9","type":"debug","z":"08b1222770f25950","name":"debug 286","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":2040,"y":1560,"wires":[]},{"id":"5c723aebd8173e18","type":"range","z":"08b1222770f25950","minin":"0","maxin":"10","minout":"0","maxout":"90","action":"clamp","round":false,"property":"payload","name":"X_Achse","x":1280,"y":2100,"wires":[["458e18235afd83ba"]]},{"id":"9464c8745827e92a","type":"range","z":"08b1222770f25950","minin":"0","maxin":"10","minout":"0","maxout":"90","action":"clamp","round":false,"property":"payload","name":"Y_Achse","x":1280,"y":2240,"wires":[["ada8739e87767107"]]},{"id":"dc2aeadf25e35680","type":"range","z":"08b1222770f25950","minin":"-10","maxin":"0","minout":"90","maxout":"0","action":"clamp","round":false,"property":"payload","name":"X_Achse","x":1280,"y":2160,"wires":[["4040928a65a2c779"]]},{"id":"3c588298273aa4eb","type":"range","z":"08b1222770f25950","minin":"-10","maxin":"0","minout":"90","maxout":"0","action":"clamp","round":false,"property":"payload","name":"Y_Achse","x":1280,"y":2300,"wires":[["8f7c47f70debf3bd"]]},{"id":"639e2fee6c6a8986","type":"range","z":"08b1222770f25950","minin":"0","maxin":"90","minout":"0","maxout":"90","action":"clamp","round":false,"property":"payload","name":"0-90","x":1590,"y":2100,"wires":[["d63cea16236d5966","d3679a85eac515ef"]]},{"id":"77a70c32bb9b1454","type":"range","z":"08b1222770f25950","minin":"0","maxin":"90","minout":"0","maxout":"90","action":"clamp","round":false,"property":"payload","name":"0-90","x":1610,"y":2160,"wires":[["d876b4191a494f25","9b6f931cc42d11a0"]]},{"id":"8116f9ed1b5eb49c","type":"range","z":"08b1222770f25950","minin":"0","maxin":"90","minout":"0","maxout":"90","action":"clamp","round":false,"property":"payload","name":"0-90","x":1610,"y":2240,"wires":[["00cc4cbe3eee97fd","f936f91999811345"]]},{"id":"170981b20d3a15cc","type":"range","z":"08b1222770f25950","minin":"0","maxin":"90","minout":"0","maxout":"90","action":"clamp","round":false,"property":"payload","name":"0-90","x":1610,"y":2300,"wires":[["4a68f1e1fb889015","b68495929eb497aa"]]},{"id":"f8c5cc9775eafc0d","type":"function","z":"08b1222770f25950","name":"global.set a_x","func":"msg.payload = msg.payload;\nglobal.set(\"a_x\", (parseFloat(msg.payload)));\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1260,"y":1840,"wires":[[]]},{"id":"e66b9aeb88fd1ef5","type":"function","z":"08b1222770f25950","name":"global.set a_y","func":"msg.payload = msg.payload;\nglobal.set(\"a_y\", (parseFloat(msg.payload)));\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1260,"y":1880,"wires":[[]]},{"id":"02145a2863fed689","type":"ui_button","z":"08b1222770f25950","name":"","group":"b5fe614cebc76e9b","order":10,"width":0,"height":0,"passthru":false,"label":"Calibrieren","tooltip":"","color":"","bgcolor":"","className":"","icon":"","payload":"true","payloadType":"bool","topic":"topic","topicType":"msg","x":750,"y":2180,"wires":[["146d93d10b232203","7d0d1b7dd7405deb"]]},{"id":"146d93d10b232203","type":"function","z":"08b1222770f25950","name":"a_x","func":"var cal = msg.payload;\nvar x= global.get(\"a_x\");\n\n\nif (cal == true){\n global.set(\"a_x_cal\", x);\n}\n\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":950,"y":2160,"wires":[[]]},{"id":"7d0d1b7dd7405deb","type":"function","z":"08b1222770f25950","name":"a_y","func":"var cal = msg.payload;\nvar y = global.get(\"a_y\");\n\n\nif (cal == true) {\n global.set(\"a_y_cal\", y);\n}\n\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":950,"y":2200,"wires":[[]]},{"id":"10a0d791bab048b8","type":"debug","z":"08b1222770f25950","name":"debug 291","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1710,"y":1920,"wires":[]},{"id":"1b0d126e78f290c5","type":"function","z":"08b1222770f25950","name":"a_x","func":"var a_x = msg.payload;\nvar x = global.get(\"a_x_cal\");\n\nmsg.payload = (a_x - x);\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1550,"y":1980,"wires":[["a99592249b539953","10a0d791bab048b8"]]},{"id":"8f7ffcf271181f68","type":"function","z":"08b1222770f25950","name":"a_x","func":"var a_y = msg.payload;\nvar y = global.get(\"a_y_cal\");\n\nmsg.payload = (a_y - y);\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1550,"y":2020,"wires":[["2044747c0c22ad14"]]},{"id":"b9f19b08c9bf8460","type":"debug","z":"08b1222770f25950","name":"debug 292","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1570,"y":1900,"wires":[]},{"id":"fd3be96ea9bcd350","type":"ui_button","z":"08b1222770f25950","name":"","group":"b5fe614cebc76e9b","order":9,"width":0,"height":0,"passthru":false,"label":"Werte setzen","tooltip":"","color":"","bgcolor":"","className":"","icon":"","payload":"","payloadType":"str","topic":"topic","topicType":"msg","x":510,"y":1560,"wires":[["af09420a71549e48","e780b0c92a72b918","6d9dc2db298fe7c3","c90778209d9a88ce","8f3e03456b76631d","a15e2d5ef9da6599","7d5da76833dfcc5c","bbe62355bdd3ea59"]]},{"id":"ac9f3001d534e0ca","type":"debug","z":"08b1222770f25950","name":"debug 293","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":810,"y":1960,"wires":[]},{"id":"d2a639ce28d14ce3","type":"debug","z":"08b1222770f25950","name":"debug 294","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1110,"y":2100,"wires":[]},{"id":"9e4a1b5130d1b1a8","type":"function","z":"08b1222770f25950","name":"a_x","func":"var a_x = msg.payload.a_x;\nvar a_x_set = global.get(\"a_x\") ;\n/*\nif (a_x === \" \") \n msg.payload = a_x_set;\n\n\nelse */\nmsg.payload= a_x;\nreturn msg ;\n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1030,"y":1980,"wires":[["4a5d061815a76558"]]},{"id":"e97ae079e54deaa2","type":"function","z":"08b1222770f25950","name":"a_y","func":"msg.payload = msg.payload.a_y;\n\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":750,"y":1780,"wires":[[]]},{"id":"43f3ac9.5214a54","type":"inject","z":"08b1222770f25950","name":"","props":[{"p":"payload"},{"p":"topic","vt":"str"}],"repeat":"5","crontab":"","once":true,"onceDelay":"6","topic":"","payload":"","payloadType":"date","x":730,"y":2400,"wires":[["7fe75716.574148"]]},{"id":"49b00b00.d657b4","type":"ui_template","z":"08b1222770f25950","group":"da67d2975b06a71d","name":"Hinten","order":1,"width":6,"height":6,"format":"<div style='width:100%; height:100%; display:flex; justify-content:center; align-items:center;'>\n <div id='image-container' style='position: relative;'>\n <img id='image-to-rotate' src=\"data:image/png;base64,{{msg.payload}}\" style='transform: rotate({{msg.payload}}deg);' />\n <div id='line'\n style='position: absolute; width: 100%; height: 3px; background-color: grey; top: 96%; transform: translateY(-50%); z-index: -1;'>\n </div>\n </div>\n</div>","storeOutMessages":true,"fwdInMessages":true,"resendOnRefresh":false,"templateScope":"local","className":"","x":1790,"y":2400,"wires":[[]]},{"id":"4a8daeb2.4a1a7","type":"base64","z":"08b1222770f25950","name":"","action":"str","property":"payload","x":1220,"y":2400,"wires":[["49b00b00.d657b4","085269f57265115e"]]},{"id":"7fe75716.574148","type":"file in","z":"08b1222770f25950","name":"","filename":"/home/pi/pekaway/hinten.png","filenameType":"str","format":"","chunk":false,"sendError":false,"encoding":"none","allProps":false,"x":950,"y":2400,"wires":[["4a8daeb2.4a1a7","3f0bfe644e7890b1"]]},{"id":"b07d788e037da7de","type":"inject","z":"08b1222770f25950","name":"","props":[{"p":"payload"},{"p":"topic","vt":"str"}],"repeat":"5","crontab":"","once":true,"onceDelay":"6","topic":"","payload":"","payloadType":"date","x":730,"y":2440,"wires":[["e7fdb12157fbfd9f"]]},{"id":"a4c7c79d6b1cecb0","type":"ui_template","z":"08b1222770f25950","group":"da67d2975b06a71d","name":"Seite","order":4,"width":6,"height":6,"format":"<div style='width:100%; height:100%; display:flex; justify-content:center; align-items:center;'>\n <div id='image-container' style='position: relative;'>\n <img id='image-to-rotate' src=\"data:image/png;base64,{{msg.payload}}\" style='transform: rotate({{msg.payload}}deg);' />\n <div id='line'\n style='position: absolute; width: 100%; height: 3px; background-color: grey; top: 96%; transform: translateY(-50%); z-index: -1;'>\n </div>\n </div>\n</div>\n \n ","storeOutMessages":true,"fwdInMessages":true,"resendOnRefresh":false,"templateScope":"local","className":"","x":1790,"y":2440,"wires":[[]]},{"id":"eccb6ae8d28a4c04","type":"base64","z":"08b1222770f25950","name":"","action":"str","property":"payload","x":1220,"y":2440,"wires":[["a4c7c79d6b1cecb0","0fec3ebdf4c1b670"]]},{"id":"e7fdb12157fbfd9f","type":"file in","z":"08b1222770f25950","name":"","filename":"/home/pi/pekaway/seite.png","filenameType":"str","format":"","chunk":false,"sendError":false,"encoding":"none","allProps":false,"x":940,"y":2440,"wires":[["eccb6ae8d28a4c04","a6b02678d68698fc"]]},{"id":"3f0bfe644e7890b1","type":"debug","z":"08b1222770f25950","name":"debug 296","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":990,"y":2360,"wires":[]},{"id":"085269f57265115e","type":"debug","z":"08b1222770f25950","name":"debug 297","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1210,"y":2360,"wires":[]},{"id":"a6b02678d68698fc","type":"debug","z":"08b1222770f25950","name":"debug 298","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":990,"y":2480,"wires":[]},{"id":"0fec3ebdf4c1b670","type":"debug","z":"08b1222770f25950","name":"debug 299","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1230,"y":2480,"wires":[]},{"id":"907deec57e9d8b8d","type":"ui_template","z":"08b1222770f25950","group":"","name":"Stylesheet Winkel hinten","order":5,"width":0,"height":0,"format":"<style>\n[node-id=\"49b00b00.d657b4\"] .value {\nfont-size: 2.9em;\nfont-weight: 100;\n}\n\n</style>\n\n\n","storeOutMessages":true,"fwdInMessages":true,"resendOnRefresh":true,"templateScope":"global","className":"","x":1990,"y":2400,"wires":[[]]},{"id":"adf060b12ea29910","type":"ui_template","z":"08b1222770f25950","group":"","name":"Stylesheet Winkel Seite","order":5,"width":0,"height":0,"format":"<style>\n[node-id=\"a4c7c79d6b1cecb0\"] .value {\nfont-size: 2.9em;\nfont-weight: 80;\n}\n\n</style>\n\n\n","storeOutMessages":true,"fwdInMessages":true,"resendOnRefresh":true,"templateScope":"global","className":"","x":1990,"y":2440,"wires":[[]]},{"id":"ae46eff168ddd975","type":"function","z":"08b1222770f25950","name":"Rotate Image","func":"// Erhalten der Winkelinformation (z. B. über MQTT)\nvar angle = msg.payload; // Der Rotationswinkel in Grad\n\n// Wert des Payloads verdoppeln\nmsg.payload = angle * 2;\n\n// CSS-Transformation zur Rotation des Bilds\nvar transformation = \"rotate(\" + msg.payload + \"deg)\";\n\n// Senden Sie die Transformation zurück\nmsg.ui_control = {\n \"angular\": true,\n \"rotate\": transformation\n};\n\nreturn msg;\n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1600,"y":2400,"wires":[["49b00b00.d657b4"]]},{"id":"f2ae14fe515000b3","type":"function","z":"08b1222770f25950","name":"Rotate Image","func":"// Erhalten der Winkelinformation (z. B. über MQTT)\nvar angle = msg.payload; // Der Rotationswinkel in Grad\n\n// Wert des Payloads verdoppeln\nmsg.payload = angle * 2;\n\n// CSS-Transformation zur Rotation des Bilds\nvar transformation = \"rotate(\" + msg.payload + \"deg)\";\n\n// Senden Sie die Transformation zurück\nmsg.ui_control = {\n \"angular\": true,\n \"rotate\": transformation\n};\n\nreturn msg;\n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1600,"y":2440,"wires":[["a4c7c79d6b1cecb0"]]},{"id":"79e68d1036ce39bb","type":"range","z":"08b1222770f25950","minin":"-4","maxin":"4","minout":"-4","maxout":"4","action":"clamp","round":false,"property":"payload","name":"X_Achse","x":1420,"y":2400,"wires":[["ae46eff168ddd975"]]},{"id":"3663c4b9d088602a","type":"range","z":"08b1222770f25950","minin":"-4","maxin":"4","minout":"-4","maxout":"4","action":"clamp","round":false,"property":"payload","name":"Y_Achse","x":1420,"y":2440,"wires":[["f2ae14fe515000b3"]]},{"id":"d3679a85eac515ef","type":"ui_text","z":"08b1222770f25950","group":"da67d2975b06a71d","order":3,"width":3,"height":1,"name":"Rechts","label":"","format":"{{msg.payload.toFixed(1)}}cm","layout":"row-center","className":"","style":false,"font":"","fontSize":"","color":"#000000","x":1900,"y":2140,"wires":[]},{"id":"9b6f931cc42d11a0","type":"ui_text","z":"08b1222770f25950","group":"da67d2975b06a71d","order":2,"width":3,"height":1,"name":"Links","label":"","format":"{{msg.payload.toFixed(1)}}cm","layout":"row-center","className":"","style":false,"font":"","fontSize":"","color":"#000000","x":1890,"y":2180,"wires":[]},{"id":"f936f91999811345","type":"ui_text","z":"08b1222770f25950","group":"da67d2975b06a71d","order":6,"width":3,"height":1,"name":"Vorne","label":"","format":"{{msg.payload.toFixed(1)}}cm","layout":"row-center","className":"","style":false,"font":"","fontSize":"","color":"#000000","x":1890,"y":2260,"wires":[]},{"id":"b68495929eb497aa","type":"ui_text","z":"08b1222770f25950","group":"da67d2975b06a71d","order":5,"width":3,"height":1,"name":"Hinten","label":"","format":"{{msg.payload.toFixed(1)}}cm","layout":"row-center","className":"","style":false,"font":"","fontSize":"","color":"#000000","x":1890,"y":2300,"wires":[]},{"id":"8f3e03456b76631d","type":"file in","z":"08b1222770f25950","name":"","filename":"pekaway/Achsabstand","filenameType":"str","format":"utf8","chunk":false,"sendError":false,"encoding":"none","allProps":false,"x":1030,"y":1380,"wires":[["d3a1a5a674a6d59c"]]},{"id":"ad1a626ea50b5dba","type":"file","z":"08b1222770f25950","name":"","filename":"pekaway/Achsabstand","filenameType":"str","appendNewline":false,"createDir":true,"overwriteFile":"true","encoding":"none","x":1760,"y":1380,"wires":[["2a8b20db4cb3e611"]]},{"id":"a15e2d5ef9da6599","type":"file in","z":"08b1222770f25950","name":"","filename":"pekaway/Radabstand","filenameType":"str","format":"utf8","chunk":false,"sendError":false,"encoding":"none","allProps":false,"x":1030,"y":1440,"wires":[["52ae58855fcc3316"]]},{"id":"3eed25c78f1de3c0","type":"file","z":"08b1222770f25950","name":"","filename":"pekaway/Radabstand","filenameType":"str","appendNewline":false,"createDir":true,"overwriteFile":"true","encoding":"none","x":1770,"y":1440,"wires":[["d473c578d18589d6"]]},{"id":"7d5da76833dfcc5c","type":"file in","z":"08b1222770f25950","name":"","filename":"pekaway/Abstand_VorderAchse","filenameType":"str","format":"utf8","chunk":false,"sendError":false,"encoding":"none","allProps":false,"x":960,"y":1500,"wires":[["4dd9b6f65e25d7c7"]]},{"id":"1e1f5f4e49f800a1","type":"file","z":"08b1222770f25950","name":"","filename":"pekaway/Abstand_VorderAchse","filenameType":"str","appendNewline":false,"createDir":true,"overwriteFile":"true","encoding":"none","x":1780,"y":1500,"wires":[["a6c405f7611d8599"]]},{"id":"bbe62355bdd3ea59","type":"file in","z":"08b1222770f25950","name":"","filename":"pekaway/Ab_vorne_rechts","filenameType":"str","format":"utf8","chunk":false,"sendError":false,"encoding":"none","allProps":false,"x":970,"y":1560,"wires":[["8b8adb2a4c2be177"]]},{"id":"8e63b1f2bc0b1062","type":"file","z":"08b1222770f25950","name":"","filename":"pekaway/Ab_vorne_rechts","filenameType":"str","appendNewline":false,"createDir":true,"overwriteFile":"true","encoding":"none","x":1830,"y":1560,"wires":[["279ed7ad902e19e9"]]},{"id":"79cf590f61e18514","type":"ui_text","z":"08b1222770f25950","group":"b5fe614cebc76e9b","order":11,"width":0,"height":0,"name":"","label":"Abstand hinten","format":"{{msg.payload}}","layout":"row-spread","className":"","style":false,"font":"","fontSize":16,"color":"#000000","x":1200,"y":1620,"wires":[]},{"id":"3d1eddeb9b0a7b7b","type":"ui_text","z":"08b1222770f25950","group":"b5fe614cebc76e9b","order":12,"width":0,"height":0,"name":"","label":"Abstand vorne","format":"{{msg.payload}}","layout":"row-spread","className":"","style":false,"font":"","fontSize":16,"color":"#000000","x":1200,"y":1660,"wires":[]},{"id":"d9be6254f271c7ee","type":"ui_text","z":"08b1222770f25950","group":"b5fe614cebc76e9b","order":13,"width":0,"height":0,"name":"","label":"Abstand links","format":"{{msg.payload}}","layout":"row-spread","className":"","style":false,"font":"","fontSize":16,"color":"#000000","x":1190,"y":1700,"wires":[]},{"id":"df08a68b0d0c9b51","type":"ui_text","z":"08b1222770f25950","group":"b5fe614cebc76e9b","order":14,"width":0,"height":0,"name":"","label":"Abstand rechts","format":"{{msg.payload}}","layout":"row-spread","className":"","style":false,"font":"","fontSize":16,"color":"#000000","x":1200,"y":1740,"wires":[]},{"id":"e0b56f47a7c7bd49","type":"ui_text","z":"08b1222770f25950","group":"b5fe614cebc76e9b","order":4,"width":2,"height":1,"name":"Radabstand","label":"","format":"{{msg.payload}}","layout":"row-spread","className":"","style":false,"font":"","fontSize":16,"color":"#000000","x":1550,"y":1440,"wires":[]},{"id":"d0ce261075309f58","type":"ui_text","z":"08b1222770f25950","group":"b5fe614cebc76e9b","order":6,"width":2,"height":1,"name":"Abstand_VorderAchse","label":"","format":"{{msg.payload}}","layout":"row-spread","className":"","style":false,"font":"","fontSize":16,"color":"#000000","x":1520,"y":1500,"wires":[]},{"id":"a686b2a46415c242","type":"ui_text","z":"08b1222770f25950","group":"b5fe614cebc76e9b","order":8,"width":2,"height":1,"name":"Abstand_v_R","label":"","format":"{{msg.payload}}","layout":"row-spread","className":"","style":false,"font":"","fontSize":16,"color":"#000000","x":1550,"y":1560,"wires":[]},{"id":"1b3ee8a07653fac2","type":"ui_text","z":"08b1222770f25950","group":"b5fe614cebc76e9b","order":2,"width":2,"height":1,"name":"Achsabstand","label":"","format":"{{msg.payload}}","layout":"row-spread","className":"","style":false,"font":"","fontSize":16,"color":"#000000","x":1550,"y":1380,"wires":[]},{"id":"07291f5b46541a6c","type":"comment","z":"08b1222770f25950","name":"231x260 Pixel","info":"","x":1790,"y":2360,"wires":[]},{"id":"be1f0b5b6fa78c70","type":"comment","z":"08b1222770f25950","name":"275x140. Pixel","info":"","x":1790,"y":2480,"wires":[]},{"id":"cb7ce55180c8ae09","type":"debug","z":"08b1222770f25950","name":"debug 309","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":810,"y":2100,"wires":[]},{"id":"201d658e48a2b67e","type":"function","z":"08b1222770f25950","name":"MPU6050","func":"//msg.payload = msg.payload.toString();\nmsg.payload = msg.payload.split(\"\\n\");\n\nmsg.payload = {\n \"Temperatur\": Number((msg.payload[0])),\n \"a_x\": Number(( msg.payload[1])),\n \"a_y\": Number((msg.payload[2])),\n \"a_z\": Number((msg.payload[3])),\n \"g_x\": Number((msg.payload[4])),\n \"g_y\": Number((msg.payload[5])),\n \"g_z\": Number((msg.payload[6])),\n \n \n}\n\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":620,"y":1760,"wires":[[]]},{"id":"4a5d061815a76558","type":"function","z":"08b1222770f25950","name":"Zahl","func":"msg.payload = Number((msg.payload))\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1150,"y":1980,"wires":[["842efc21bd9fac1b","d2a639ce28d14ce3"]]},{"id":"7b429a29dbf1b9ce","type":"function","z":"08b1222770f25950","name":"Zahl","func":"msg.payload = Number((msg.payload))\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1150,"y":2020,"wires":[["7aad7f1d1dc1afe0"]]},{"id":"23d21b49a929acac","type":"ui_group","name":"Wasserwaage","tab":"370a2d2d181e8c6f","order":1,"disp":false,"width":7,"collapse":false},{"id":"b5fe614cebc76e9b","type":"ui_group","name":"Config","tab":"370a2d2d181e8c6f","order":2,"disp":true,"width":"6","collapse":false,"className":""},{"id":"da67d2975b06a71d","type":"ui_group","name":"Bilder","tab":"370a2d2d181e8c6f","order":3,"disp":false,"width":"6","collapse":false,"className":""},{"id":"370a2d2d181e8c6f","type":"ui_tab","name":"Wasserwaage","icon":"dashboard","order":31,"disabled":false,"hidden":false}]