@BT6100
Hallo Ihr alle
meinGPS habe ich nun am laufen, ist zwar nicht so genau ( ich stehe beim Nachbarn im Pool  )
)
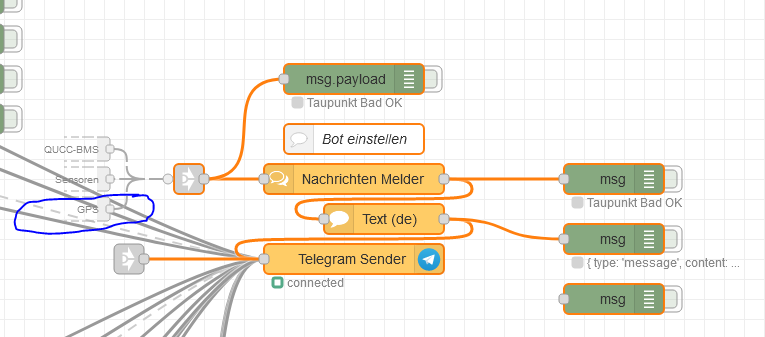
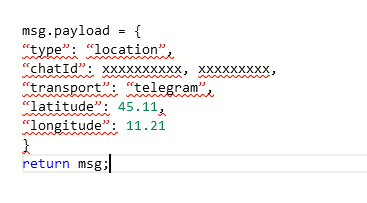
aber ich benötige trotzdem mal eure Hilfe. Ich möchte mir die Positionsdaten via Telegram aufs Handy schicken, so das eine Landkarte mit der Position erscheint. dazu gibt es eine Node “Locacion” in der Beschreibung steht das man “lon” und “lat” mit einer “Funktion Node” in die "location Node " übertragen kann. Das bekomme ich aber nicht hin. in der “Debug Node” hinter der "location Node " kommt nicht an.
Kann da einer helfen???
über den Linkout schicke ich das nach Telegram.
mit dem get GPS Telegram, kann ich nur die Zahlen von “lon” und "lat " zu Telegram schicken.
und hier wird es auf der Telegram Seite weitergeleitet.
[{"id":"f3f48c5d.b76e5","type":"debug","z":"67f4ff1d.729ad8","name":"","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"payload","targetType":"msg","statusVal":"payload","statusType":"auto","x":530,"y":240,"wires":[]},{"id":"38b10073.4674","type":"catch","z":"67f4ff1d.729ad8","name":"","scope":null,"x":140,"y":180,"wires":[["c94a70c1.72634"]]},{"id":"8a3645a3.5aaa3","type":"debug","z":"67f4ff1d.729ad8","name":"","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":430,"y":180,"wires":[]},{"id":"ff349659.7127f8","type":"file","z":"67f4ff1d.729ad8","d":true,"name":"gpsd_output","filename":"/home/pi/gpsd.json","filenameType":"str","appendNewline":true,"createDir":false,"overwriteFile":"false","x":530,"y":280,"wires":[[]]},{"id":"2e1212b1.cb86f6","type":"csv","z":"67f4ff1d.729ad8","d":true,"name":"gpsd-csv","sep":",","hdrin":"","hdrout":"none","multi":"one","ret":"\\n","temp":"class,tag,device,mode,time,ept,lat,lon,alt,epx,epy,epv,track,speed,climb,eps,epc","skip":0,"strings":true,"include_empty_strings":false,"include_null_values":false,"x":540,"y":320,"wires":[["c2f8e0d5.63d078"]]},{"id":"c2f8e0d5.63d078","type":"file","z":"67f4ff1d.729ad8","d":true,"name":"gpsd-csv-file","filename":"/home/pi/gpsd.csv","filenameType":"str","appendNewline":true,"createDir":false,"overwriteFile":"false","x":710,"y":320,"wires":[[]]},{"id":"c1d76ea2.67c3d","type":"gpsd","z":"67f4ff1d.729ad8","name":"Adafruit Ultimate GPS","hostname":"localhost","port":"2947","tpv":true,"sky":true,"info":false,"device":true,"gst":false,"att":false,"x":180,"y":440,"wires":[["f3f48c5d.b76e5","ff349659.7127f8","2e1212b1.cb86f6","6560f5f6.c0ed8c"]]},{"id":"c94a70c1.72634","type":"change","z":"67f4ff1d.729ad8","name":"IsCatch","rules":[{"t":"set","p":"isCatch","pt":"msg","to":"true","tot":"bool"}],"action":"","property":"","from":"","to":"","reg":false,"x":280,"y":180,"wires":[["8a3645a3.5aaa3"]]},{"id":"a97018b5.9c91c8","type":"status","z":"67f4ff1d.729ad8","name":"GPS Status","scope":["c1d76ea2.67c3d"],"x":730,"y":240,"wires":[["e9645f90.35e3","a4c44223.226da8"]]},{"id":"e9645f90.35e3","type":"debug","z":"67f4ff1d.729ad8","name":"","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"status","targetType":"msg","statusVal":"status","statusType":"auto","x":1070,"y":140,"wires":[]},{"id":"a4c44223.226da8","type":"switch","z":"67f4ff1d.729ad8","name":"GPS Fix Mode","property":"status.text","propertyType":"msg","rules":[{"t":"cont","v":"no fix","vt":"str"},{"t":"cont","v":"2D fix","vt":"str"},{"t":"cont","v":"3D fix","vt":"str"}],"checkall":"false","outputs":3,"x":900,"y":240,"wires":[["29a14d53.e497aa"],["725b522c.fe1b8c"],["c8672662.924228"]]},{"id":"725b522c.fe1b8c","type":"debug","z":"67f4ff1d.729ad8","name":"2D fix","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1079.5,"y":264.5,"wires":[]},{"id":"29a14d53.e497aa","type":"debug","z":"67f4ff1d.729ad8","name":"no fix","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1090,"y":200,"wires":[]},{"id":"c8672662.924228","type":"debug","z":"67f4ff1d.729ad8","name":"3D fix","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1073.5,"y":319.5,"wires":[]},{"id":"6560f5f6.c0ed8c","type":"switch","z":"67f4ff1d.729ad8","name":"","property":"payload.class","propertyType":"msg","rules":[{"t":"eq","v":"TPV","vt":"str"}],"checkall":"true","repair":false,"outputs":1,"x":430,"y":460,"wires":[["202c890a31817d08","8f6fe0eb3a69a995","578b222a2660fe95"]]},{"id":"4d22a0bd.63dda","type":"change","z":"67f4ff1d.729ad8","name":"","rules":[{"t":"set","p":"payload.name","pt":"msg","to":"Worldmap","tot":"str"}],"action":"","property":"","from":"","to":"","reg":false,"x":870,"y":460,"wires":[["23b5e03.345882"]]},{"id":"23b5e03.345882","type":"worldmap","z":"67f4ff1d.729ad8","name":"","lat":"","lon":"","zoom":"18","layer":"OSMG","cluster":"0","maxage":"","usermenu":"show","layers":"show","panit":"true","panlock":"false","zoomlock":"false","hiderightclick":"false","coords":"none","showgrid":"false","allowFileDrop":"false","path":"/mapui","overlist":"DR,CO,RA,DN,HM","maplist":"OSMG,OSMC,EsriC,EsriS,EsriT,EsriO,EsriDG,NatGeo,UKOS,OpTop","mapname":"","mapurl":"","mapopt":"","mapwms":false,"x":1050,"y":460,"wires":[]},{"id":"2cf3ed7c.bd6ad2","type":"ui_worldmap","z":"67f4ff1d.729ad8","group":"88f77589.0122d8","order":1,"width":21,"height":15,"name":"Worldmap ","lat":"","lon":"","zoom":"","layer":"OSMG","cluster":"","maxage":"","usermenu":"show","layers":"show","panit":"true","panlock":"false","zoomlock":"false","hiderightclick":"false","coords":"deg","showgrid":"false","allowFileDrop":"false","path":"/mapui","overlist":"DR,CO,RA,DN,HM","maplist":"OSMG,OSMC,EsriC,EsriS,EsriT,EsriO,EsriDG,NatGeo,UKOS,OpTop","mapname":"","mapurl":"","mapopt":"","mapwms":false,"x":1070,"y":420,"wires":[]},{"id":"202c890a31817d08","type":"function","z":"67f4ff1d.729ad8","name":"function 3","func":"var latitude = msg.payload.lat ;\nvar longitude = msg.payload.lon;\nvar time = msg.payload.time;\n\n\nmsg.payload = {}\nmsg.payload.latitude = latitude\nmsg.payload.longitude = longitude\nmsg.payload.Latitude = latitude\nmsg.payload.Longitude = longitude\nmsg.payload.time = time\n\n\nreturn msg;\n\n\n\n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":600,"y":580,"wires":[["ce1c533fdb5932a5","7c13dca0957e6e19"]]},{"id":"7291affecb5132aa","type":"debug","z":"67f4ff1d.729ad8","name":"","active":true,"tosidebar":true,"console":false,"tostatus":true,"complete":"payload","targetType":"msg","statusVal":"payload","statusType":"auto","x":1230,"y":580,"wires":[]},{"id":"23f235bc864d837f","type":"debug","z":"67f4ff1d.729ad8","name":"","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":1210,"y":640,"wires":[]},{"id":"47b7da2d9bc870a9","type":"link out","z":"67f4ff1d.729ad8","name":"link out 4","mode":"link","links":["b6a1d30a3b14db4b","3c7a80664934fd5c","d858108fcdca4324"],"x":1225,"y":460,"wires":[]},{"id":"ce1c533fdb5932a5","type":"rbe","z":"67f4ff1d.729ad8","name":"","func":"deadbandEq","gap":"0.001","start":"","inout":"out","septopics":true,"property":"msg.payload.latitude","topi":"topic","x":790,"y":580,"wires":[["7291affecb5132aa","14f01f7180fc8060","b522a03f2df703bb","bee964af7d78261d"]]},{"id":"14f01f7180fc8060","type":"function","z":"67f4ff1d.729ad8","name":"function 4","func":"var time = msg.payload.time;\n\n\n\nmsg.payload.time = time\n\n\nreturn msg;\n\n\n\n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1020,"y":640,"wires":[["23f235bc864d837f"]]},{"id":"ef9703cdff9c5d54","type":"chatbot-location","z":"67f4ff1d.729ad8","name":"","latitude":"","longitude":"","place":"","x":800,"y":500,"wires":[["47b7da2d9bc870a9","88b0258811ee77b2"]]},{"id":"b1c2e04daf5e400f","type":"debug","z":"67f4ff1d.729ad8","name":"","active":true,"tosidebar":true,"console":false,"tostatus":true,"complete":"payload","targetType":"msg","statusVal":"payload","statusType":"auto","x":1230,"y":540,"wires":[]},{"id":"8f6fe0eb3a69a995","type":"function","z":"67f4ff1d.729ad8","name":"function 5","func":"var latitude = msg.payload.lat ;\nvar longitude = msg.payload.lon;\nvar time = msg.payload.time;\n\n\nmsg.payload = {}\nmsg.payload.latitude = latitude;\nmsg.payload.longitude = longitude;\n//msg.payload.Latitude = latitude;\n//msg.payload.Longitude = longitude;\n//msg.payload.time = time;\n\n\nreturn msg;\n\n\n\n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":600,"y":500,"wires":[["ef9703cdff9c5d54"]]},{"id":"b522a03f2df703bb","type":"function","z":"67f4ff1d.729ad8","name":"set Global","func":"\nglobal.set(\"GPSlatitude\", msg.payload.latitude);\nglobal.set(\"GPSlongitude\", msg.payload.longitude);\nglobal.set(\"GPStime\", msg.payload.time);\n\n\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1010,"y":600,"wires":[[]]},{"id":"7c13dca0957e6e19","type":"rbe","z":"67f4ff1d.729ad8","name":"","func":"deadbandEq","gap":"0.001","start":"","inout":"out","septopics":true,"property":"msg.payload.longitude","topi":"topic","x":790,"y":620,"wires":[["b522a03f2df703bb","14f01f7180fc8060"]]},{"id":"bee964af7d78261d","type":"function","z":"67f4ff1d.729ad8","name":"get GPS Telegram","func":"msg.payload.content = global.get(\"GPSlatitude\").toString() +\"\\n \"+ \n global.get(\"GPSlongitude\").toString() ;\nmsg.payload = msg.payload.content;\nreturn msg;\n\n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":990,"y":540,"wires":[["47b7da2d9bc870a9","b1c2e04daf5e400f"]]},{"id":"88b0258811ee77b2","type":"debug","z":"67f4ff1d.729ad8","name":"","active":true,"tosidebar":true,"console":false,"tostatus":true,"complete":"payload","targetType":"msg","statusVal":"payload","statusType":"auto","x":1230,"y":500,"wires":[]},{"id":"578b222a2660fe95","type":"delay","z":"67f4ff1d.729ad8","name":"","pauseType":"rate","timeout":"5","timeoutUnits":"seconds","rate":"1","nbRateUnits":"1","rateUnits":"minute","randomFirst":"1","randomLast":"5","randomUnits":"seconds","drop":false,"allowrate":false,"outputs":1,"x":620,"y":460,"wires":[["4d22a0bd.63dda"]]},{"id":"88f77589.0122d8","type":"ui_group","name":"Karte","tab":"c4c17961.4519f8","order":1,"disp":true,"width":21,"collapse":false,"className":""},{"id":"c4c17961.4519f8","type":"ui_tab","name":"GPS","icon":"dashboard","disabled":false,"hidden":false}]
Danke
und Gruß
Arno