EDIT (10. Mai 2024):
Die zweite Version ist online! Download unter Beta-Releases → VanPiCTRL_Core_Images
Wie angekündigt sind wir jetzt mit der BETA2.4 auf Debian 12 Bookworm unterwegs, mit NodeJS 22 und Python 3.11.
Dafür wurden die Bluetooth Skripte für JBD, Pekaway Wireless Shunt und Pekaway MPPT S20 überarbeitet, die Verbindung wird nun dauerhaft aufrecht erhalten und alle 20min neu gestartet, oder wenn keine Daten mehr kommen. Gleichzeitig wurden die Skripte für DS18B20 und die Tanksensoren überarbeitet.
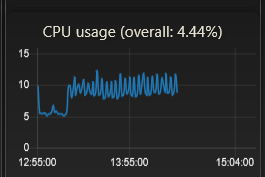
Das führt im Großen und Ganzen dazu, dass wir eine deutliche Reduzierung im Ressourcenverbrauch haben, im Test teilweise bis unter 2% durchschnittliche CPU Last (mit 4 gleichzeitigen, dauerhaften Bluetooth Verbindungen/Abfragen).
Dazu sind alle Verbindungen mit Bluetooth auch im Access Point Modus deutlich stabiler geworden und haben eigentlich keine weiteren Probleme mehr verursacht.
Für das Wifi-Management wird jetzt Network-Manager verwendet, anstatt wie vorher hostapd und dnsmasq.
(Das neue Image wurde noch nicht auf dem älteren Relayboard getestet, kann gut sein, dass da noch System Packages und Python Module nachinstalliert werden müssen)
Den vollen Changelog findet ihr auf GitHub.
Moinsen,
das erste Image für den VAN PI Core ist online und kann heruntergeladen werden:
Und zwar hier: Download unter Beta-Releases → VanPiCTRL_Core_Images
Mit der neuen Hardware haben ein paar neue Bausteine ihren Weg ins Van Pi OS gefunden:
- RuuviTags Pro 3in1 können hinzugefügt und ausgelesen werden
- der Pekaway MPPT Solar Charger S20 kann ausgelesen werden
- der neue (kommende) Pekaway wireless Shunt wird unterstützt und ausgelesen
- der MPU6050 auf dem Board kann zur Positionsanzeige benutzt werden
- es gibt eine neue Kategorie “Wireless” in den Einstellungen, für alles was mit Wifi und Bluetooth zu tun hat.
- die Umschaltung zwischen kapazitiven und Widerstandsensoren wird nun in der Software vorgenommen, also keine Jumper mehr auf dem Board
- es gibt ein neues Pythonscript “ble_manager.py”, darüber werden alle Scripts gestartet, die BLE verwenden. Das Script prüft, ob grade ein anderes Script läuft und stellt dann das neue Script hinten an. Damit sollen gleichzeitige Zugriffe auf den BLE Port verhindert werden. Heißt aber auch, dass die Werte der einzelnen Scripts nicht mehr ganz so regelmäßig kommen, weil es davon abhängig ist, wie lange die Schlange ist. (Scripts die bereits in der Schlange sind werden aber nicht nochmal eingereiht). Also lief bis jetzt sehr zuverlässig.
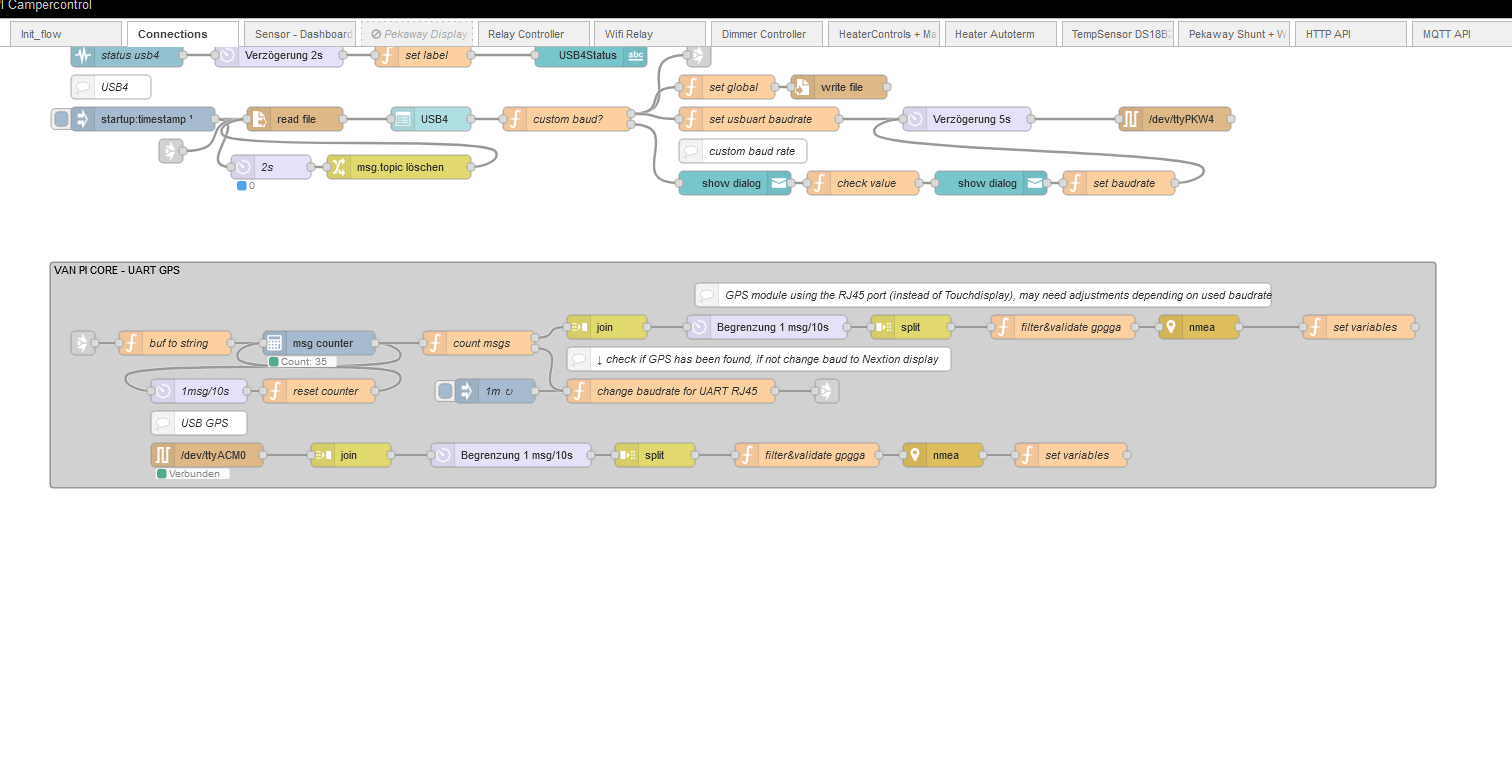
- es gibt eine Weltkarte für die Darstellung der GPS Daten
- es gibt die Möglichkeit einen UART RJ45 GPS Adapter anstelle des Touchisplays anzuschließen, die Baudrate wird dabei automatisch geändert zwischen Display (38400) und GPS Adapter (9600)
- es sind ein paar neue Endpunkte zur API dazugekommen, zum großen Teil benötigt für die Smartphone App
- die MQTT Funktionen, die sich um den Fernzugriff kümmern sind erweitert worden
- man kann seine Logindaten für die App jetzt im Frontend eintragen (vorher in der App registrieren, oder eigenen Server benutzen)
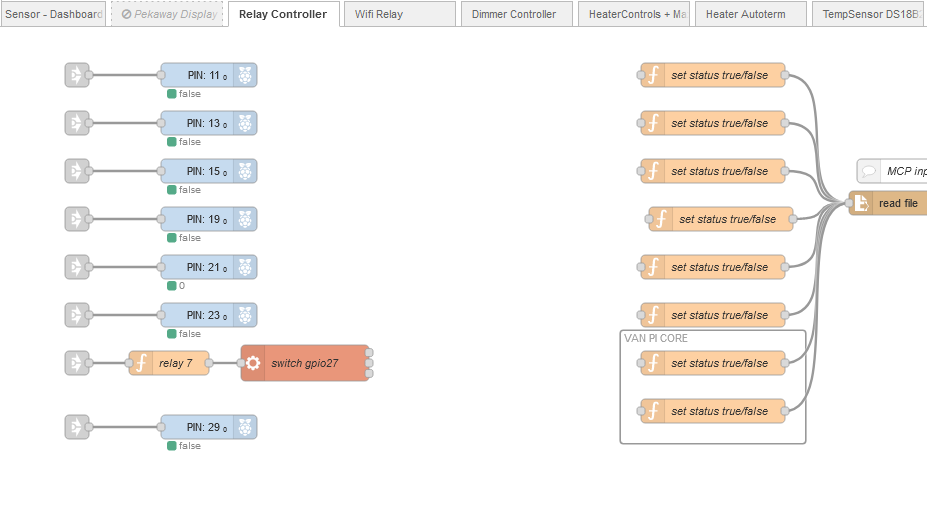
– also wer schon einen Router bzw. Internetzugriff hat kann darüber mit unserer App sein System steuern. Ansonsten sind die neuen IoT-Bridges in der Entwicklung - die MCP Inputs heißen jetzt “Switches Inputs” und wurden für das neue Board auf 8 erweitert
Im Großen und Ganzen war das das Wichtigste.
Im Prinzip kann das Image ebenfalls auf dem älteren Relayboard genutzt werden. Ich hab alles, was nicht mehr benötigt wird für das neuere Core, nur deaktiviert und nicht gelöscht, ein bisschen nacharbeiten muss man also. Zum Beispiel die Wassersensoren und der alte Shunt sind komplett deaktiviert, weil auf dem neuen Board ein anderes Script benutzt wird zum Auslesen.
Denkt dran, dass ihr eine zweite Node-RED Instanz starten könnt, dann könnt ihr immer direkt vergleichen im Backend, solltet ihr Anpassungen vorgenommen haben.
Bitte beachtet, dass das Image sich noch im Beta Stadium befindet. Gleichzeitig arbeiten wir an einem komplett neuem Image, mit den neusten Versionen von Debian, NodeJS, Python etc. etc.
Dazu muss ich auch sagen, dass der neue Shunt manchmal Probleme macht. Also im Zusammenhang mit dem Image bzw. der Bluetoothverbindung zum RPI, man kann zum Beispiel über das Smartphone mit einer direkten Verbindung immer zuverlässig alles auslesen. Fehleranalyse läuft, meistens ist es ja bekannterweise irgendwas dummes ![]()
Wenn ihr Probleme und Bugs findet, bitte immer her damit!