Ja ich habe 2 komplette eigene Systeme.
Das vorgänger Relayboard mit Software 1.2 ,Pekaway Shunt kabelgebunden, 4GB Pi
Das Core mit Victron smart Shunt,2GB Pi
Das alte Relayboard hat es vom schreibtisch nie in den Trailer zum festeinbau geschafft
Das Core ist jetzt fest verbaut im Trailer.
Im Trailer ist ein victron smart Solar 75/15 verbaut und eine Webasto Airtop 2000 stc,Pekaway Display,Dimmy Kabelgebunden.
@Half-car-trailer Besteht die Möglichkeit, dass du mal Raspberry 1 vom Schreibtisch (bei dem das Display funktioniert) auf den Core setzt und die SD-Karten tauschst? Und da schaust ob das Display dann funktioniert?
Ich habe nun die Pi der beiden boards getauscht, das Display Funtioniert nicht.
Jetzt hab ich ein neue SD karte mit 2.4 Beta erstellt und in das alte schwarze Relayboard
Eingesetzt und das Display Funktioniert.
Es schein ein Problem mit dem Displayausgang des Core boards zu geben.
Gruß michl
Moin Sascha
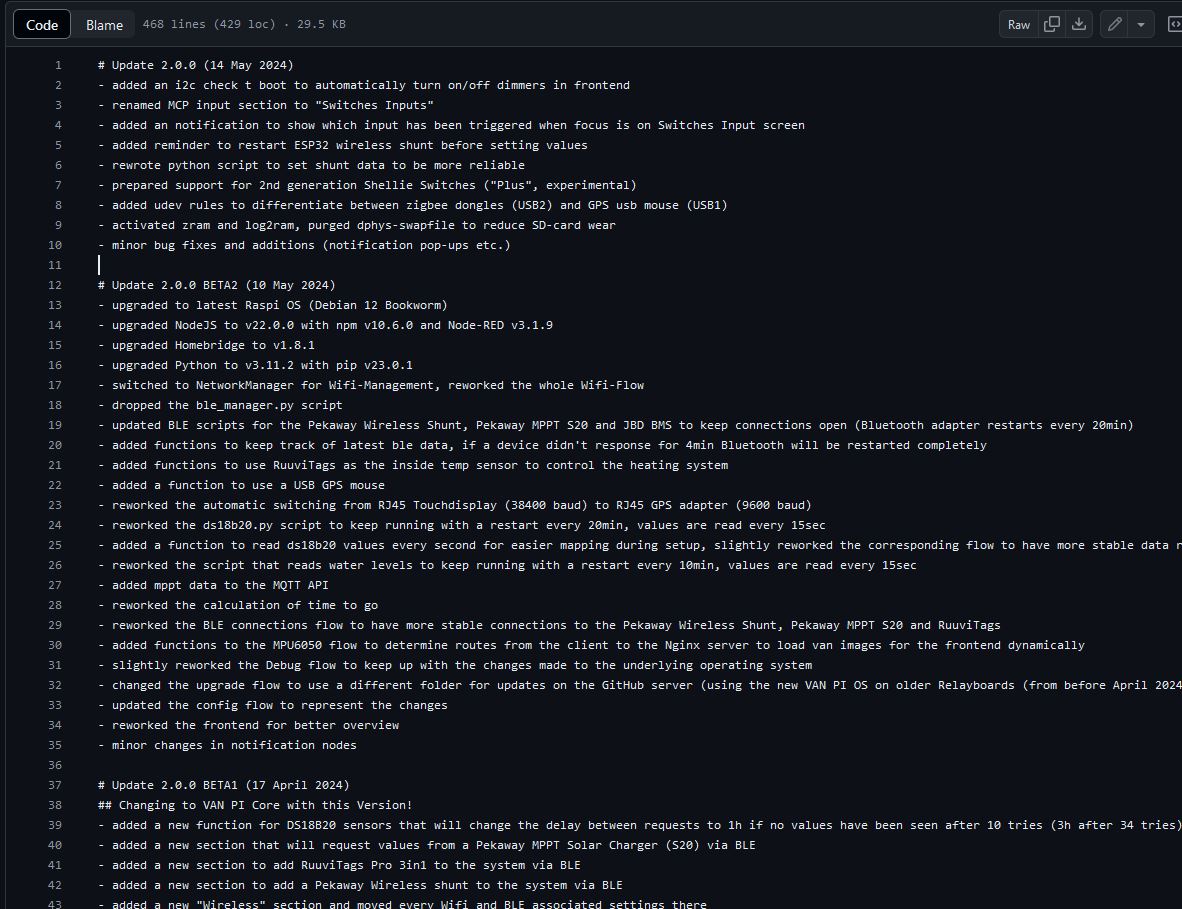
Schau mal aufs Datum, sollte die 1.version sein. Im 2.4 beta steht auch die 2.0.0 drin. Fürs Update über die Software muss da was anderes stehen wie auf github also 2.0.1 dann klaps auch mit dem Update
Das Image in der offiziellen Download Sektion ist das aktuellste, das ist identisch mit den Dateien auf github. Ein Update aus der Software heraus funktioniert aber noch nicht, weil ich das Updatescript noch nicht fertig habe.
Der wichtigste Unterschied zur letzten Beta-Version ist die neue udev Regel. Damit wird festgelegt, dass zigbee und GPS USB an bestimmte ports angeschlossen werden müssen. Dafür funktioniert das dann aber auch ohne weitere Einstellungen in NR oder der Zigbee config vornehmen zu müssen
Hallo zusammen,
habe gestern bei meinem Reaisboard (alte) ein update über die UI gemacht, es wird ja angezeigt das es ein Update auf V2.0.0 gibt.
Jetzt bleibt er bei :
Welcome to the VanPi Control Dashboard
We’re firing up the engine, please stand by!
stehen.
Im #flow ist auch nichts mehr zu sehen.
Ich dachte ja, wenn es hier als aktuelle Version angezeigt wird, dass es auch auf dem Relaisboard freigegeben ist (brauches es für Ruuvi).
Hier, stehen ja einige Sachen die man machen kann.
Da muss man aber, glaube, schon tiefer im Thema sein.
Gibt es eine Schritt für Schritt Anweisung?
Und das alte Board sollte doch wohl weiterhin lauffähige Updates bekommen!
Danke.
Gruß Gerd
Hey @Gerdi
wie das mit einem Automatischen Update ist weiß ich nicht.
Ich habe bis jetzt immer das Update direkt auf die Karte geschrieben.
Das neue Update habe ich noch nicht drauf, aber die erste 2er Version, und die Beta-Version, und eigentlich habe ich nichts verändert und mein altes Relayboard V_1 läuft. Die einzigen Änderungen die ich gemacht habe sind meiner Programmierung, und der Board_Version 1 geschuldet.
Gruß Arno
Ich weiß nicht wie das beim Core ist,
Beim alten Relayboard istes die Display buchse, und die hat 12 V,also was du vor hast mit step down modul, ok.
Mit der neuen Software, brauchte ich nix mehr zu mach, das modul wurde erkannt. Das kann bei den neo auch schon mal ne halbe Stunde dauern. Warum auch immer. Ich habe anfangs auch gedacht dass es nicht funktioniert. Aus Frust habe ich es dann liegen lassen, znd siehe da. Alles gut. Funktioniert
Hab ähnliche Erfahrungen gemacht, dass es recht lange dauern kann bis das Modul ein GPS Signal findet. Manchmal ging es auch gar nicht… Gleichzeitig hab ich hier eine GPS-USB-Maus, die findet Signal innerhalb von 2min.
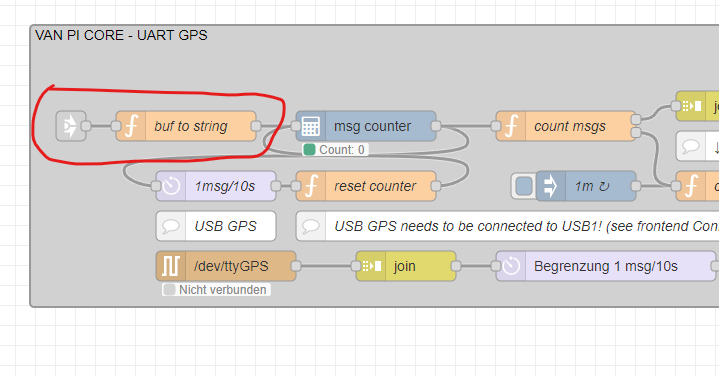
Ansonsten kannst du mal schauen was im “Connections Flow” reinkommt, ganz unten:
Dort wird anhand der Menge der Daten innerhalb eines Zeitraums die Baudrate angepasst, weil die GPS Module schicken sehr schnell hintereinander viele Nachrichten. Sobald die Baudrate umgestellt ist, sollest du dort etwas lesen können. Davor sollten auch schon Sachen reinkommen, aber nur unlesbare Zeichen. Daran könntest du dann am Ende des Flows zumindest erkennen ob das Modul richtig funktioniert und nur das GPS Signal fehlt.
Wäre es nicht sinn voll den Flow von Serial weg zu machen und anstand das auf den gpsd zu setzen. Dann ist das Protokoll auch egal und muss nicht NMEA sein. Gerade der NEO spricht auch sein “eigenes” Protokoll.
Zum GPS Fix es gibt Tabellen wo die Satelliten stehen müssten wenn die Uralt sind dauert der Fix ewig mach mal kann man die Aktualisieren.
Ich bin in der 1.2erversion über GPSD gegangen, war auch nicht schneller, der Neo braucht halt seine Zeit, mag Vorteile haben, ich habe z.B keine Geschwindigkeit gefunden, ist aber ja auch nicht wichtig für mich, Ort und Höhe reicht mir. GPSD ist ja auch installiert, kann ja jeder für sich entscheiden. In der ersten 2er Version bin ich noch über GPSD gegangen weil es nicht funktioniert hat mit der automatisch Umschaltung von Display auf GPS, und ich habe den Umbau meiner GPS Programmierung gescheut.
Hat außer mir noch jemand Probleme bei der Kommunikation mit den Shellys? Mit der letzten 1er-Version von Van PI hat alles funktioniert, mit dieser Version bekomme ich es aber nicht zum Laufen. Gibt es evtl. einen Fehler in den flows?