@SaschaKorn
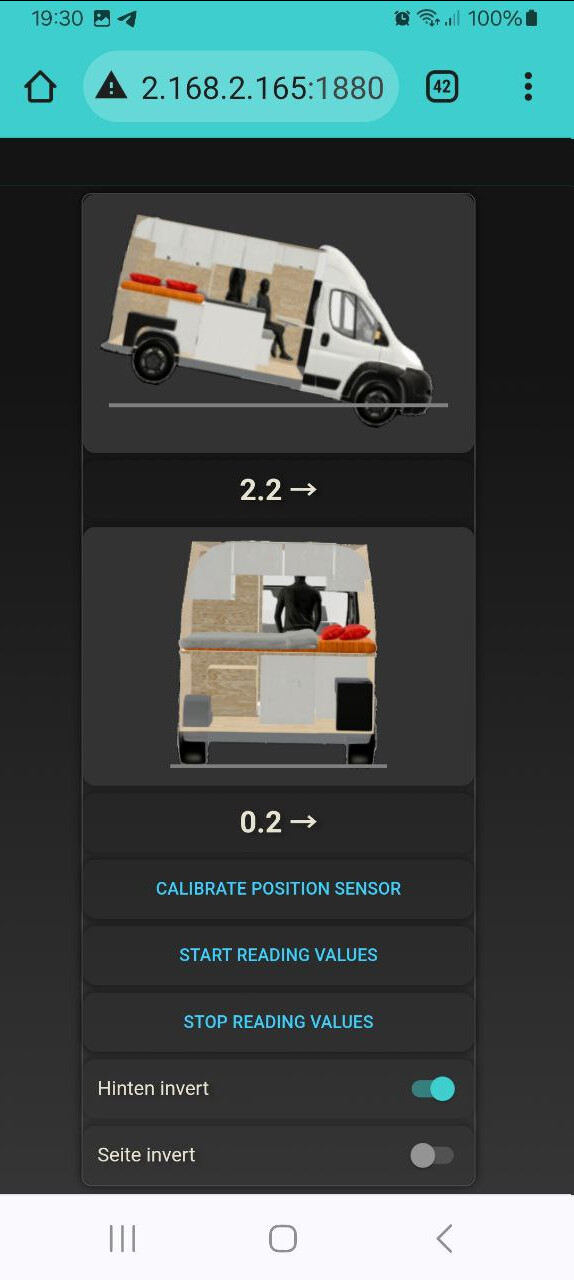
Ich habe den Lagesensor noch mals überarbeitet.
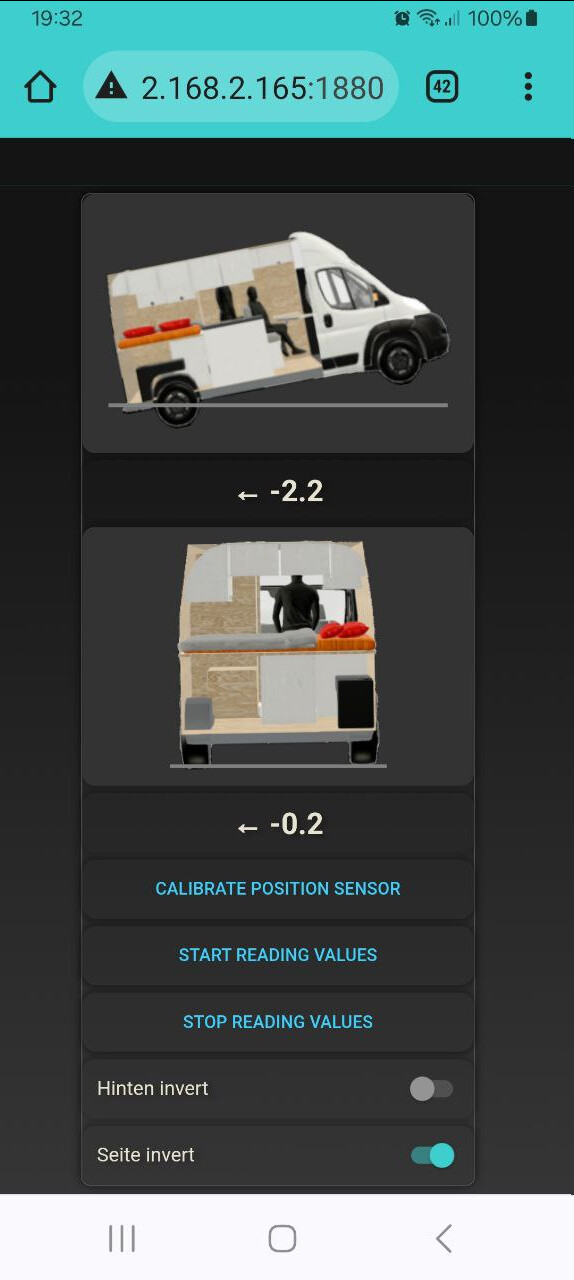
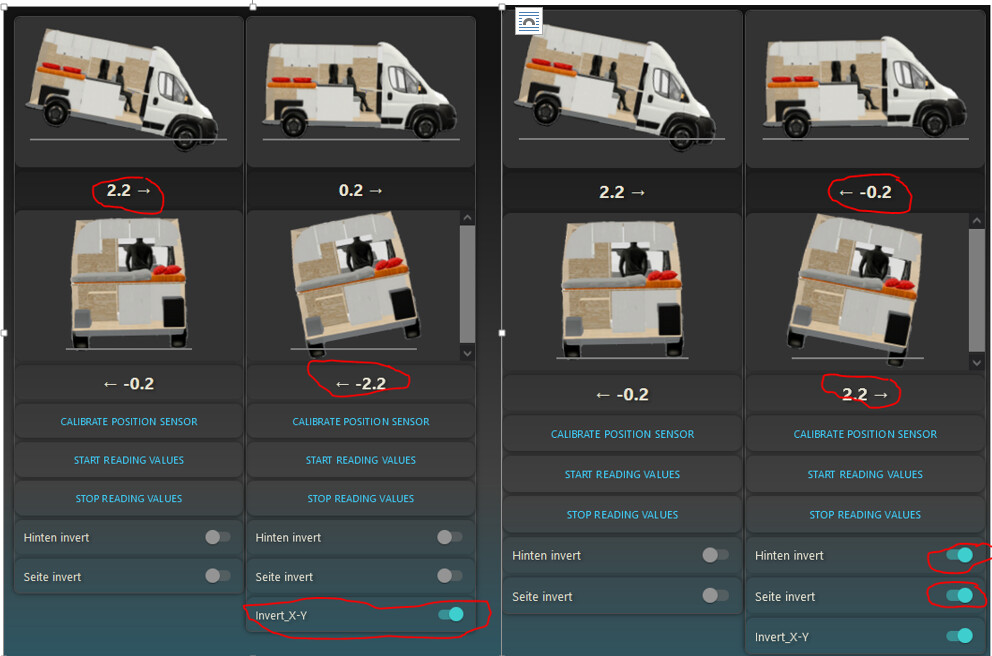
Je nach Einbau kann es sein das dass Fahrzeug seitlich höher steht aber vorne wird angezeigt, dann muss die X und Y-Achse getauscht werden, das ist jetzt auch möglich.
- X-Y Achse invertieren
- Vorne, Hinten invertieren
- Rechts, Links invertieren.
So sollte alles abgedeckt sein, ausser der diagonale Einbau.
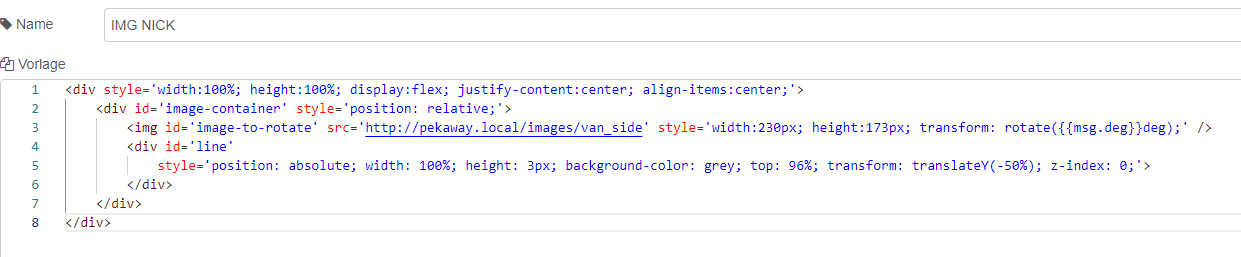
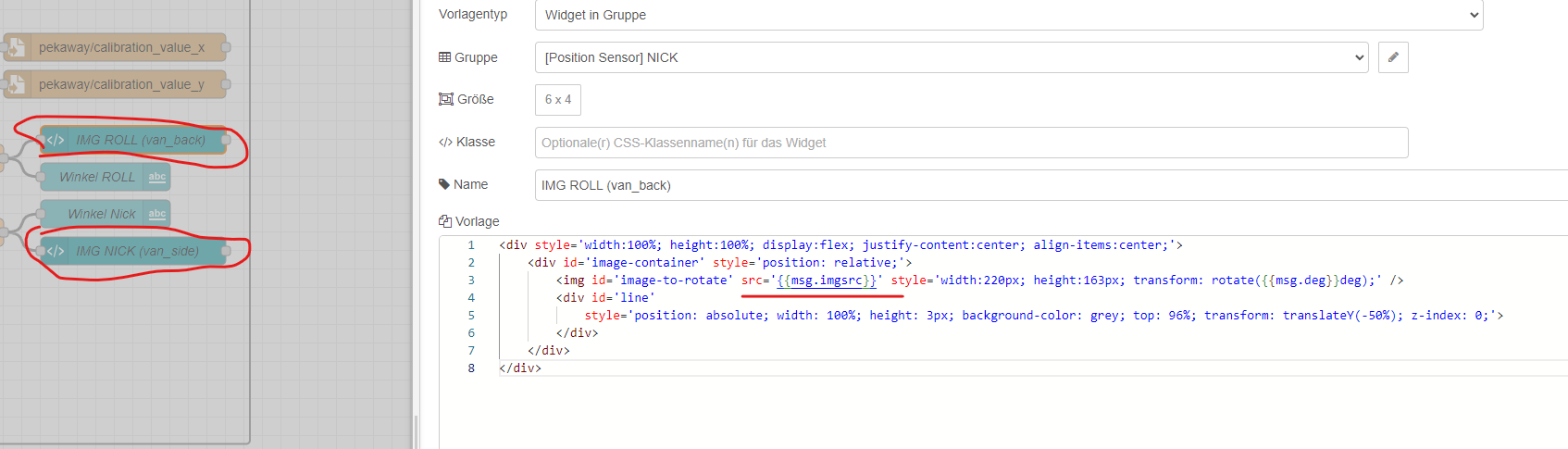
Und das wäre der passende Code dazu.
[{"id":"412b3e2d021f7a33","type":"tab","label":"MPU6050","disabled":false,"info":"","env":[]},{"id":"28317a609d1f9088","type":"group","z":"412b3e2d021f7a33","name":"VAN PI Core - MPU6050","style":{"label":true},"nodes":["1b9dc0867cb661f6","8451a751463042c9","bf691c714efcade5","63932da30bffb350","08f4acda39a4fd6c","2b92b4b12adfccf8","4294f39433a1201e","e3d30d7e6b010e61","341ed83f050b4803","ea94790d60088f2b","a0bd49a36478db9f","637fdd8edec530ae","c97d2c6e65d6499a","d3d9c7466b1faf2c","228c6725131385d2","4adb66e17d7380d5","c10a77ef742fb80f","2ae3ad321e0b44bc","2033121e09c18d1a","b7a28cb45375548b","f64370c6a37789c5","3ee52b191ff24358","254c4f4303ed77b0","b042109c12b7f3b7","c617af9cb6a3b2b4","c9304231b5b20487","d863d973a195d5f6","c778b5405259afc5","7f20562a77a7db67","db0fcaab3d04ed3e","3fccd69a2a2628e5","586bed5703f1717c","552e407cf1f05637","30adc535cd1b68af","cc98ba65fee8da86","c05b625079ee9c2d","0d3490bb463acc4f","ce423c89e0568529","70b602981d1c6584","08a1c99e47e29820","9c4b434f6a44ba9b","12d296f580a42546","8b714b8778ad30c0","1c9000fc4312308c","62869401d8254fb0","234058333abc0a0c","5e93ce02866b5228","be71a52074c8f338","8c7279fb74ea0146","f9cfecfe6a075524","8b8983f75c50716d","47f04cab6865df70","8049bb636c4d60b2","6640573b4e9ea752","724f78382ff2ea37","2124ead5251b0e33","938f4f7de9551140","b8280def883e01c8","1bf5ce9417d5b4c5","e618d524b8fb1a5d","25e422eec5038057","e84865bfbbf9b6c8","967eddca69fe0a4d","08cee44e0f40f602","4edd0f665c2aff42","0eef0b5eda0bb504","4b5ff93a116364e6","c899a9070ea9364e","84145618729de136","b6748802ee2f89a8","78d150ddae56107b","c7a16d287311788c","b16b8dc5d8ac537e","05579560f10f95f2","dbb8c0d6c6194afc","ef8a22e6bcb221da","95b153b4f0114ca2","72f3f52265ea74fb","6b481701f9c1297f","26bc12977899ca94","6a4aa317707d4cfb","8e2d5c85106235a8","c6ee8b69b8f88b3a","1d13fff3ca3e30ad","8321cefa88554e56","e5db32434873bf02","a9d489fc39a88f63","058a657c42cb14c0","98fb66ad79c0f7b4","0782a2000c24fc48","058998d6c8af7c34","bd0426ee910a4d73","7ef14a1b10c7def0"],"x":14,"y":119,"w":3002,"h":582},{"id":"1b9dc0867cb661f6","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"add Offset","func":"// Erhalten der Eingangsdaten\nvar eingangsdaten = msg.payload;\n\n// Kalibrierungswert aus der globalen Variable verwenden\nvar kalibrierungswert = global.get(\"calibration_value_x\") || 0; // Standardwert ist 0, falls nicht gesetzt\n\n// Anpassen der Daten um den Kalibrierungswert\nvar datenMitKalibrierung = eingangsdaten - kalibrierungswert;\n\n// Auf eine Dezimalstelle runden\nvar gerundeteDaten = datenMitKalibrierung.toFixed(1); // 1 steht für eine Dezimalstelle\n\n// Wenn der gerundete Wert 0 ist, auf 0.0 ändern\nif (Number(gerundeteDaten) === 0) {\n gerundeteDaten = \"0.0\";\n}\n\n// Weiterleiten der modifizierten und gerundeten Daten\nmsg.payload = parseFloat(gerundeteDaten); // Als Zahl statt String zurückgeben\n\nreturn msg;\n\n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1310,"y":320,"wires":[["1d13fff3ca3e30ad","e5db32434873bf02"]]},{"id":"8451a751463042c9","type":"smooth","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","property":"payload","action":"mean","count":"3","round":"1","mult":"single","reduce":true,"x":1160,"y":320,"wires":[["1b9dc0867cb661f6"]]},{"id":"bf691c714efcade5","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"add Offset","func":"// Erhalten der Eingangsdaten\nvar eingangsdaten = msg.payload;\n\n// Kalibrierungswert aus der globalen Variable verwenden\nvar kalibrierungswert = global.get(\"calibration_value_y\") || 0; // Standardwert ist 0, falls nicht gesetzt\n\n// Anpassen der Daten um den Kalibrierungswert\nvar datenMitKalibrierung = eingangsdaten - kalibrierungswert;\n\n// Auf eine Dezimalstelle runden\nvar gerundeteDaten = datenMitKalibrierung.toFixed(1); // 1 steht für eine Dezimalstelle\n\n// Wenn der gerundete Wert 0 ist, auf \"0.0\" ändern\nif (Number(gerundeteDaten) === 0) {\n gerundeteDaten = \"0.0\";\n}\n\n// Weiterleiten der modifizierten und gerundeten Daten\nmsg.payload = parseFloat(gerundeteDaten); // Als Zahl statt String zurückgeben\n\nreturn msg;\n\n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1310,"y":400,"wires":[["8321cefa88554e56","98fb66ad79c0f7b4"]]},{"id":"63932da30bffb350","type":"smooth","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","property":"payload","action":"mean","count":"3","round":"1","mult":"single","reduce":true,"x":1160,"y":400,"wires":[["bf691c714efcade5"]]},{"id":"08f4acda39a4fd6c","type":"ui_text","z":"412b3e2d021f7a33","g":"28317a609d1f9088","group":"4d2dbbaac32d7d9a","order":2,"width":6,"height":1,"name":"Winkel Nick","label":"","format":"{{msg.value}}","layout":"row-center","className":"mpu6050","x":2750,"y":400,"wires":[]},{"id":"2b92b4b12adfccf8","type":"ui_button","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Start Calibration","group":"4d2dbbaac32d7d9a","order":5,"width":6,"height":1,"passthru":true,"label":"Calibrate position sensor","tooltip":"","color":"","bgcolor":"","className":"","icon":"","payload":"start_calibration","payloadType":"str","topic":"start_calibration","topicType":"str","x":240,"y":240,"wires":[["4294f39433a1201e","e3d30d7e6b010e61","ea94790d60088f2b","c10a77ef742fb80f","2ae3ad321e0b44bc"]]},{"id":"4294f39433a1201e","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Kalibrierungsfunktion X","func":"// Variablen für die Kalibrierung\nlet calibrationDatax = context.get(\"calibrationData_x\") || [];\nlet timer = context.get(\"timer\") || null;\n\n// Startet die Kalibrierung bei einer Nachricht vom Button\nif (msg.topic === \"start_calibration\" && !timer) {\n calibrationDatax = [];\n context.set(\"calibrationData_x\", calibrationDatax);\n\n timer = setTimeout(() => {\n let sum = calibrationDatax.reduce((a, b) => a + b, 0);\n let avg = calibrationDatax.length > 0 ? sum / calibrationDatax.length : 0;\n global.set(\"calibration_value_x\", avg); // Speichert das Ergebnis in der globalen Variable\n context.set(\"timer\", null);\n node.send({ payload: avg });\n }, 5000); // Kalibrierungszeitraum: 5 Sekunden\n\n context.set(\"timer\", timer);\n return;\n}\n\n// Sammelt Daten, wenn eine Nachricht vom Sensor empfangen wird\nif (msg.topic === \"x_angle\"&& timer) {\n let value = parseFloat(msg.payload);\n if (!isNaN(value)) {\n calibrationDatax.push(value);\n context.set(\"calibrationData_x\", calibrationDatax);\n }\n}\n\nreturn null; // Sendet keine Nachricht, bis der Timer abläuft","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1210,"y":200,"wires":[[]]},{"id":"e3d30d7e6b010e61","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Kalibrierungsfunktion Y","func":"// Variablen für die Kalibrierung\nlet calibrationData = context.get(\"calibrationData_y\") || [];\nlet timer = context.get(\"timer\") || null;\n\n// Startet die Kalibrierung bei einer Nachricht vom Button\nif (msg.topic === \"start_calibration\" && !timer) {\n calibrationData = [];\n context.set(\"calibrationData_y\", calibrationData);\n\n timer = setTimeout(() => {\n let sum = calibrationData.reduce((a, b) => a + b, 0);\n let avg = calibrationData.length > 0 ? sum / calibrationData.length : 0;\n global.set(\"calibration_value_y\", avg); // Speichert das Ergebnis in der globalen Variable\n context.set(\"timer\", null);\n node.send({ payload: avg });\n }, 30000); // Kalibrierungszeitraum: 5 Sekunden\n\n context.set(\"timer\", timer);\n return;\n}\n\n// Sammelt Daten, wenn eine Nachricht vom Sensor empfangen wird\nif (msg.topic === \"y_angle\" && timer) {\n let value = parseFloat(msg.payload);\n if (!isNaN(value)) {\n calibrationData.push(value);\n context.set(\"calibrationData_y\", calibrationData);\n }\n}\n\nreturn null; // Sendet keine Nachricht, bis der Timer abläuft","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1210,"y":240,"wires":[["228c6725131385d2"]]},{"id":"341ed83f050b4803","type":"ui_toast","z":"412b3e2d021f7a33","g":"28317a609d1f9088","position":"top right","displayTime":"5","highlight":"","sendall":false,"outputs":0,"ok":"OK","cancel":"","raw":false,"className":"","topic":"","name":"","x":690,"y":160,"wires":[]},{"id":"ea94790d60088f2b","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"calibrating...","func":"msg.payload = \"Calibrating position sensor...\"\ndelete msg.topic\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":490,"y":200,"wires":[["341ed83f050b4803"]]},{"id":"a0bd49a36478db9f","type":"ui_text","z":"412b3e2d021f7a33","g":"28317a609d1f9088","group":"4d2dbbaac32d7d9a","order":4,"width":6,"height":1,"name":"Winkel ROLL","label":"","format":"{{msg.value}}","layout":"row-center","className":"mpu6050","x":2750,"y":360,"wires":[]},{"id":"637fdd8edec530ae","type":"exec","z":"412b3e2d021f7a33","g":"28317a609d1f9088","command":"python3 pekaway/mpu_py/mpuAngle.py","addpay":"payload","append":"","useSpawn":"true","timer":"","winHide":false,"oldrc":false,"name":"mpuAngle.py","x":670,"y":340,"wires":[["c97d2c6e65d6499a","2124ead5251b0e33"],[],[]]},{"id":"c97d2c6e65d6499a","type":"json","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","property":"payload","action":"","pretty":false,"x":810,"y":340,"wires":[["d3d9c7466b1faf2c"]]},{"id":"d3d9c7466b1faf2c","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"filter values","func":"let msgX = {}\nlet msgY = {}\nlet msgT = {}\nmsgX.payload = Number(msg.payload.x_angle);\nmsgX.topic = \"x_angle\";\n//node.send([msg, null, null])\nmsgY.payload = Number(msg.payload.y_angle);\nmsgY.topic = \"y_angle\";\n//node.send([null, msg, null])\nmsgT.payload = msg.payload.mpu_temp.toFixed(1);\n//node.send([null, null, msg])\nreturn [msgX, msgY, msgT]","outputs":3,"noerr":0,"initialize":"","finalize":"","libs":[],"x":950,"y":340,"wires":[["8451a751463042c9","4294f39433a1201e"],["63932da30bffb350","e3d30d7e6b010e61"],["8b8983f75c50716d"]]},{"id":"228c6725131385d2","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"kill then => time 2","func":"msg.kill = \"SIGKILL\";\nnode.send(msg);\n\nsetTimeout(function () {\n delete msg.kill;\n msg.payload = \"--time 2\";\n node.send(msg);\n}, 500); // milliseconds delay","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1430,"y":240,"wires":[["637fdd8edec530ae","724f78382ff2ea37"]]},{"id":"4adb66e17d7380d5","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"time 5","func":"delete msg.kill\nmsg.payload = \"--time 5\"\nreturn msg","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1130,"y":580,"wires":[["db0fcaab3d04ed3e"]]},{"id":"c10a77ef742fb80f","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"kill then => time 0.25","func":"msg.kill = \"SIGKILL\";\nnode.send(msg);\n\nsetTimeout(function () {\n delete msg.kill;\n msg.payload = \"--time 0.25\";\n node.send(msg);\n}, 1000); // milliseconds delay","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":480,"y":260,"wires":[["637fdd8edec530ae"]]},{"id":"2ae3ad321e0b44bc","type":"delay","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"5.3s","pauseType":"delay","timeout":"5.3","timeoutUnits":"seconds","rate":"1","nbRateUnits":"1","rateUnits":"second","randomFirst":"1","randomLast":"5","randomUnits":"seconds","drop":false,"allowrate":false,"outputs":1,"x":390,"y":160,"wires":[["2033121e09c18d1a"]]},{"id":"2033121e09c18d1a","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"done","func":"msg.payload = \"Calibration done\"\ndelete msg.topic\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":510,"y":160,"wires":[["341ed83f050b4803"]]},{"id":"b7a28cb45375548b","type":"inject","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","props":[{"p":"payload"},{"p":"name","v":"Position Sensor","vt":"str"}],"repeat":"","crontab":"","once":true,"onceDelay":"15","topic":"","payload":"","payloadType":"date","x":130,"y":600,"wires":[["3ee52b191ff24358","6a4aa317707d4cfb"]]},{"id":"f64370c6a37789c5","type":"exec","z":"412b3e2d021f7a33","g":"28317a609d1f9088","command":"","addpay":"payload","append":"","useSpawn":"false","timer":"","winHide":false,"oldrc":false,"name":"","x":510,"y":600,"wires":[["254c4f4303ed77b0"],[],[]]},{"id":"3ee52b191ff24358","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"check processes","func":"delete msg.reset\nmsg.payload = \"ps aux | grep mpuAngle\"\nreturn msg","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":350,"y":600,"wires":[["f64370c6a37789c5"]]},{"id":"254c4f4303ed77b0","type":"split","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","splt":"\\n","spltType":"str","arraySplt":1,"arraySpltType":"len","stream":false,"addname":"","x":630,"y":600,"wires":[["b042109c12b7f3b7"]]},{"id":"b042109c12b7f3b7","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"kill?","func":"if (msg.payload.includes(\"mpuAngle.py --time\")) {\n const match = msg.payload.match(/\\b\\w+\\s+(\\d+)/)\n msg.pid = match ? parseInt(match[1], 10) : null\n if (msg.pid == null) {\n return [msg, null]\n }\n else {\n msg.kill = \"SIGKILL\";\n // msg.payload = \"sudo pkill -f 'python3.*mpuAngle.py.*'\"\n return [msg, msg]\n }\n}\nelse return [msg, null ]","outputs":2,"noerr":0,"initialize":"","finalize":"","libs":[],"x":750,"y":600,"wires":[["c617af9cb6a3b2b4"],["234058333abc0a0c"]]},{"id":"c617af9cb6a3b2b4","type":"delay","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","pauseType":"rate","timeout":"0.1","timeoutUnits":"seconds","rate":"1","nbRateUnits":"2","rateUnits":"second","randomFirst":"1","randomLast":"5","randomUnits":"seconds","drop":true,"allowrate":false,"outputs":1,"x":940,"y":580,"wires":[["4adb66e17d7380d5"]]},{"id":"c9304231b5b20487","type":"ui_button","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Start reading","group":"4d2dbbaac32d7d9a","order":6,"width":6,"height":1,"passthru":true,"label":"Start reading values","tooltip":"","color":"","bgcolor":"","className":"","icon":"","payload":"start_fast_read","payloadType":"str","topic":"","topicType":"str","x":230,"y":340,"wires":[["d863d973a195d5f6","1c9000fc4312308c"]]},{"id":"d863d973a195d5f6","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"kill then => time 0.25","func":"msg.kill = \"SIGKILL\";\nnode.send(msg);\n\nsetTimeout(function () {\n delete msg.kill;\n msg.payload = \"--time 0.25\";\n node.send(msg);\n}, 500); // milliseconds delay","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":440,"y":340,"wires":[["637fdd8edec530ae"]]},{"id":"c778b5405259afc5","type":"ui_button","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Stop reading","group":"4d2dbbaac32d7d9a","order":7,"width":6,"height":1,"passthru":true,"label":"Stop reading values","tooltip":"","color":"","bgcolor":"","className":"","icon":"","payload":"stop_fast_read","payloadType":"str","topic":"","topicType":"str","x":230,"y":440,"wires":[["7f20562a77a7db67"]]},{"id":"7f20562a77a7db67","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"reset","func":"\nmsg.reset = true\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":390,"y":440,"wires":[["3ee52b191ff24358","1c9000fc4312308c"]]},{"id":"db0fcaab3d04ed3e","type":"delay","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"2s","pauseType":"delay","timeout":"2","timeoutUnits":"seconds","rate":"1","nbRateUnits":"1","rateUnits":"second","randomFirst":"1","randomLast":"5","randomUnits":"seconds","drop":false,"allowrate":false,"outputs":1,"x":1290,"y":580,"wires":[["637fdd8edec530ae"]]},{"id":"3fccd69a2a2628e5","type":"link in","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"positionSensor start","links":["44b78f2a6ec1dafb"],"x":115,"y":340,"wires":[["c9304231b5b20487"]]},{"id":"586bed5703f1717c","type":"link in","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"positionSensor stop","links":["ebdf10e1d4ee8666"],"x":115,"y":440,"wires":[["c778b5405259afc5"]]},{"id":"552e407cf1f05637","type":"ui_ui_control","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","events":"all","x":220,"y":480,"wires":[["30adc535cd1b68af","cc98ba65fee8da86"]]},{"id":"30adc535cd1b68af","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"check tab","func":"if (msg.name != \"Position Sensor\" && flow.get(\"tabname\") == \"Position Sensor\") {\n node.send(msg);\n}\nflow.set(\"tabname\", msg.name);","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":400,"y":480,"wires":[["3ee52b191ff24358"]]},{"id":"cc98ba65fee8da86","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"check tab","func":"if (msg.payload == \"change\" && msg.name == \"Position Sensor\") {\n msg.reset = true\n return msg;\n}","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":240,"y":380,"wires":[["d863d973a195d5f6"]]},{"id":"c05b625079ee9c2d","type":"comment","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"mpuAngle.py running with 5s when tab not opened","info":"","x":230,"y":560,"wires":[]},{"id":"0d3490bb463acc4f","type":"comment","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"mpuAngle.py running with 0.5s when tab active","info":"","x":320,"y":300,"wires":[]},{"id":"ce423c89e0568529","type":"range","z":"412b3e2d021f7a33","g":"28317a609d1f9088","minin":"-45","maxin":"45","minout":"-9","maxout":"9","action":"scale","round":false,"property":"payload","name":"","x":2250,"y":400,"wires":[["70b602981d1c6584"]]},{"id":"70b602981d1c6584","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"save global","func":"msg.payload = Number(msg.payload.toFixed(1))*-1;\nglobal.set(\"y_angle\", msg.payload)\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":2390,"y":400,"wires":[["08a1c99e47e29820"]]},{"id":"08a1c99e47e29820","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Rotate Image","func":"// Erhalten der Winkelinformation (z. B. über MQTT)\nvar angle = msg.payload; // Der Rotationswinkel in Grad\n\n// Wert des Payloads vervielfachen\nmsg.deg = msg.payload * 5;//*10 would mean to use the actual angle, but looks weird in the dashboard\n\n// CSS-Transformation zur Rotation des Bilds\nvar transformation = \"rotate(\" + msg.deg + \"deg)\";\n\n// Senden Sie die Transformation zurück\nmsg.ui_control = {\n \"angular\": true,\n \"rotate\": transformation\n};\n\n\n// reduce the flickering (when values change for 0.1 or less in a timeframe of 1S, then do not update the images)\nlet lastValueTime = flow.get(\"y_lastValueTime\") ?? Date.now()\nlet lastValue = flow.get(\"y_value\") ?? 0\nif (Math.abs(lastValue - msg.payload) <= 0.1 && Math.abs(lastValueTime - Date.now()) < 1000) {\n //flow.set(\"y_value\", msg.payload)\n flow.set(\"y_lastValueTime\", Date.now())\n return null\n}\nflow.set(\"y_lastValueTime\", Date.now())\nflow.set(\"y_value\", msg.payload)\nmsg.value = msg.payload < 0 ? \"← \" + msg.payload : msg.payload > 0 ? msg.payload + \" →\" : msg.payload\n\nreturn msg;\n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":2560,"y":400,"wires":[["08f4acda39a4fd6c","b8280def883e01c8","c6ee8b69b8f88b3a"]]},{"id":"9c4b434f6a44ba9b","type":"range","z":"412b3e2d021f7a33","g":"28317a609d1f9088","minin":"-45","maxin":"45","minout":"-9","maxout":"9","action":"scale","round":false,"property":"payload","name":"","x":2250,"y":340,"wires":[["12d296f580a42546"]]},{"id":"12d296f580a42546","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"save global","func":"msg.payload = Number(msg.payload.toFixed(1));\nglobal.set(\"x_angle\", msg.payload)\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":2390,"y":340,"wires":[["8b714b8778ad30c0"]]},{"id":"8b714b8778ad30c0","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Rotate Image","func":"// Erhalten der Winkelinformation (z. B. über MQTT)\nvar angle = msg.payload; // Der Rotationswinkel in Grad\n\n// Wert des Payloads vervielfachen\nmsg.deg = msg.payload * 5; //*10 would mean to use the actual angle, but looks weird in the dashboard\n\n// CSS-Transformation zur Rotation des Bilds\nvar transformation = \"rotate(\" + msg.deg + \"deg)\";\n\n// Senden Sie die Transformation zurück\nmsg.ui_control = {\n \"angular\": true,\n \"rotate\": transformation\n};\n\n// reduce the flickering (when values change for 0.1 or less in a timeframe of 1S, then do not update the images)\nlet lastValueTime = flow.get(\"x_lastValueTime\") ?? Date.now()\nlet lastValue = flow.get(\"x_value\") ?? 0\nif (Math.abs(lastValue - msg.payload) <= 0.1 && Math.abs(lastValueTime - Date.now()) < 1000) {\n //flow.set(\"x_value\", msg.payload)\n flow.set(\"x_lastValueTime\", Date.now())\n return null\n}\nflow.set(\"x_lastValueTime\", Date.now())\nflow.set(\"x_value\", msg.payload)\nmsg.value = msg.payload < 0 ? \"← \" + msg.payload : msg.payload > 0 ? msg.payload + \" →\" : msg.payload\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":2560,"y":340,"wires":[["a0bd49a36478db9f","938f4f7de9551140","e84865bfbbf9b6c8","25e422eec5038057"]]},{"id":"1c9000fc4312308c","type":"delay","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"5m","pauseType":"delay","timeout":"5","timeoutUnits":"minutes","rate":"1","nbRateUnits":"1","rateUnits":"second","randomFirst":"1","randomLast":"5","randomUnits":"seconds","drop":false,"allowrate":false,"outputs":1,"x":390,"y":380,"wires":[["62869401d8254fb0"]]},{"id":"62869401d8254fb0","type":"delay","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"1msg/5m","pauseType":"rate","timeout":"0.1","timeoutUnits":"seconds","rate":"1","nbRateUnits":"5","rateUnits":"minute","randomFirst":"1","randomLast":"5","randomUnits":"seconds","drop":true,"allowrate":false,"outputs":1,"x":520,"y":380,"wires":[["3ee52b191ff24358"]]},{"id":"234058333abc0a0c","type":"delay","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"1msg/0.3s","pauseType":"rate","timeout":"0.1","timeoutUnits":"seconds","rate":"1","nbRateUnits":"0.3","rateUnits":"second","randomFirst":"1","randomLast":"5","randomUnits":"seconds","drop":true,"allowrate":false,"outputs":1,"x":910,"y":620,"wires":[["5e93ce02866b5228"]]},{"id":"5e93ce02866b5228","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"set cmd","func":"delete msg.kill\ndelete msg.pid\nmsg.payload = \"/usr/bin/sudo pkill -f \\'python3.\\*mpuAngle.py\\'\"\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1140,"y":620,"wires":[["be71a52074c8f338"]]},{"id":"be71a52074c8f338","type":"exec","z":"412b3e2d021f7a33","g":"28317a609d1f9088","command":"","addpay":"payload","append":"","useSpawn":"false","timer":"2.5","winHide":false,"oldrc":false,"name":"kill mpuAngle.py","x":1320,"y":620,"wires":[[],[],[]]},{"id":"8c7279fb74ea0146","type":"link in","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"positionSensor calibrate","links":["46505864c3d9e739"],"x":115,"y":240,"wires":[["2b92b4b12adfccf8"]]},{"id":"f9cfecfe6a075524","type":"inject","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","props":[{"p":"payload"},{"p":"topic","vt":"str"}],"repeat":"","crontab":"","once":false,"onceDelay":0.1,"topic":"","payload":"","payloadType":"date","x":140,"y":180,"wires":[["c9304231b5b20487"]]},{"id":"8b8983f75c50716d","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"get mpu temp","func":"global.set(\"mpu6050_temp\", Number(msg.payload))","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1180,"y":440,"wires":[[]]},{"id":"47f04cab6865df70","type":"file","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","filename":"pekaway/calibration_value_x","filenameType":"str","appendNewline":false,"createDir":true,"overwriteFile":"true","encoding":"none","x":2000,"y":220,"wires":[[]]},{"id":"8049bb636c4d60b2","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"save calibration","func":"let newMsg = {}\nmsg.payload = global.get(\"calibration_value_x\")\nnewMsg.payload = global.get(\"calibration_value_y\")\nreturn [msg, newMsg];","outputs":2,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1780,"y":240,"wires":[["47f04cab6865df70"],["6640573b4e9ea752"]]},{"id":"6640573b4e9ea752","type":"file","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","filename":"pekaway/calibration_value_y","filenameType":"str","appendNewline":false,"createDir":true,"overwriteFile":"true","encoding":"none","x":2000,"y":260,"wires":[[]]},{"id":"724f78382ff2ea37","type":"delay","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"2s","pauseType":"delay","timeout":"2","timeoutUnits":"seconds","rate":"1","nbRateUnits":"1","rateUnits":"second","randomFirst":"1","randomLast":"5","randomUnits":"seconds","drop":false,"allowrate":false,"outputs":1,"x":1630,"y":240,"wires":[["8049bb636c4d60b2"]]},{"id":"2124ead5251b0e33","type":"debug","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"debug 177","active":false,"tosidebar":true,"console":false,"tostatus":true,"complete":"true","targetType":"full","statusVal":"payload","statusType":"auto","x":910,"y":180,"wires":[]},{"id":"938f4f7de9551140","type":"ui_template","z":"412b3e2d021f7a33","d":true,"g":"28317a609d1f9088","group":"f89e1392760d829e","name":"IMG ROLL","order":8,"width":6,"height":4,"format":"<div style='width:100%; height:100%; display:flex; justify-content:center; align-items:center;'>\n <div id='image-container' style='position: relative;'>\n <img id='image-to-rotate' src='http://pekaway.local/images/van_back' style=' transform: rotate({{msg.deg}}deg);' />\n <div id='line'\n style='position: absolute; width: 100%; height: 3px; background-color: grey; top: 96%; transform: translateY(-50%); z-index: 0;'>\n </div>\n </div>\n</div>","storeOutMessages":true,"fwdInMessages":true,"resendOnRefresh":true,"templateScope":"local","className":"","x":2770,"y":320,"wires":[[]]},{"id":"b8280def883e01c8","type":"ui_template","z":"412b3e2d021f7a33","g":"28317a609d1f9088","group":"4d2dbbaac32d7d9a","name":"IMG NICK","order":1,"width":6,"height":4,"format":"<div style='width:100%; height:100%; display:flex; justify-content:center; align-items:center;'>\n <div id='image-container' style='position: relative;'>\n <img id='image-to-rotate' src='http://pekaway.local/images/van_side' style=' transform: rotate({{msg.deg}}deg);' />\n <div id='line'\n style='position: absolute; width: 100%; height: 3px; background-color: grey; top: 96%; transform: translateY(-50%); z-index: 0;'>\n </div>\n </div>\n</div>","storeOutMessages":true,"fwdInMessages":true,"resendOnRefresh":true,"templateScope":"local","className":"","x":2760,"y":440,"wires":[[]]},{"id":"1bf5ce9417d5b4c5","type":"range","z":"412b3e2d021f7a33","g":"28317a609d1f9088","minin":"-45","maxin":"45","minout":"45","maxout":"-45","action":"scale","round":false,"property":"payload","name":"","x":1860,"y":300,"wires":[["c7a16d287311788c"]]},{"id":"e618d524b8fb1a5d","type":"range","z":"412b3e2d021f7a33","g":"28317a609d1f9088","minin":"-45","maxin":"45","minout":"45","maxout":"-45","action":"scale","round":false,"property":"payload","name":"","x":1880,"y":440,"wires":[["05579560f10f95f2"]]},{"id":"25e422eec5038057","type":"ui_template","z":"412b3e2d021f7a33","g":"28317a609d1f9088","group":"4d2dbbaac32d7d9a","name":"IMG ROLL","order":3,"width":6,"height":4,"format":"<div style='width:100%; height:100%; display:flex; justify-content:center; align-items:center;'>\n <div id='image-container' style='position: relative;'>\n <img id='image-to-rotate' src='http://pekaway.local/images/van_back' style='width:176px; height:190px; transform: rotate({{msg.deg}}deg);' />\n <div id='line'\n style='position: absolute; width: 100%; height: 3px; background-color: grey; top: 96%; transform: translateY(-50%); z-index: 0;'>\n </div>\n </div>\n</div>","storeOutMessages":true,"fwdInMessages":true,"resendOnRefresh":true,"templateScope":"local","className":"","x":2770,"y":280,"wires":[[]]},{"id":"e84865bfbbf9b6c8","type":"ui_template","z":"412b3e2d021f7a33","d":true,"g":"28317a609d1f9088","group":"f89e1392760d829e","name":"IMG ROLL","order":9,"width":6,"height":4,"format":"<div style='width:100%; height:100%; display:flex; justify-content:center; align-items:center;'>\n <div id='image-container' style='position: relative;'>\n <img id='image-to-rotate' src='http://pekaway.local/images/van_back' style='width:230px; height:173px; transform: rotate({{msg.deg}}deg);' />\n <div id='line'\n style='position: absolute; width: 100%; height: 3px; background-color: grey; top: 96%; transform: translateY(-50%); z-index: 0;'>\n </div>\n </div>\n</div>","storeOutMessages":true,"fwdInMessages":true,"resendOnRefresh":true,"templateScope":"local","className":"","x":2930,"y":340,"wires":[[]]},{"id":"967eddca69fe0a4d","type":"comment","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"231x260 Pixel","info":"","x":2770,"y":240,"wires":[]},{"id":"08cee44e0f40f602","type":"comment","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Hinten ","info":"","x":2750,"y":200,"wires":[]},{"id":"4edd0f665c2aff42","type":"comment","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Seite","info":"","x":2770,"y":520,"wires":[]},{"id":"0eef0b5eda0bb504","type":"ui_switch","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","label":"Hinten invert","tooltip":"","group":"4d2dbbaac32d7d9a","order":8,"width":0,"height":0,"passthru":true,"decouple":"false","topic":"topic","topicType":"msg","style":"","onvalue":"true","onvalueType":"bool","onicon":"","oncolor":"","offvalue":"false","offvalueType":"bool","officon":"","offcolor":"","animate":false,"className":"","x":1810,"y":520,"wires":[["dbb8c0d6c6194afc"]]},{"id":"4b5ff93a116364e6","type":"ui_switch","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","label":"Seite invert","tooltip":"","group":"4d2dbbaac32d7d9a","order":9,"width":0,"height":0,"passthru":true,"decouple":"false","topic":"topic","topicType":"msg","style":"","onvalue":"true","onvalueType":"bool","onicon":"","oncolor":"","offvalue":"false","offvalueType":"bool","officon":"","offcolor":"","animate":false,"className":"","x":1810,"y":560,"wires":[["ef8a22e6bcb221da"]]},{"id":"c899a9070ea9364e","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Invert Hinten","func":"var normal= flow.get(\"hintennormal\");\nvar invert= flow.get(\"hinteninvert\")\nvar umsch = flow.get(\"hinten\")\n\nif (umsch==false){\n msg.payload=normal\n}\nif (umsch==true){\n msg.payload=invert\n}\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":2110,"y":340,"wires":[["9c4b434f6a44ba9b"]]},{"id":"84145618729de136","type":"comment","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"275x140. Pixel","info":"","x":2770,"y":480,"wires":[]},{"id":"b6748802ee2f89a8","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Invert Seite","func":"var normal= flow.get(\"seitenormal\");\nvar invert= flow.get(\"seiteinvert\")\nvar umsch = flow.get(\"seite\")\n\nif (umsch==false){\n msg.payload=normal\n}\nif (umsch==true){\n msg.payload=invert\n}\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":2110,"y":400,"wires":[["ce423c89e0568529"]]},{"id":"78d150ddae56107b","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"set normal","func":"flow.set(\"hintennormal\", msg.payload) \nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1870,"y":340,"wires":[["c899a9070ea9364e"]]},{"id":"c7a16d287311788c","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"set invert","func":"flow.set(\"hinteninvert\", msg.payload) \n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":2000,"y":300,"wires":[[]]},{"id":"b16b8dc5d8ac537e","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"set normal","func":"flow.set(\"seitenormal\", msg.payload) \nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1890,"y":400,"wires":[["b6748802ee2f89a8"]]},{"id":"05579560f10f95f2","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"set invert","func":"flow.set(\"seiteinvert\", msg.payload) \n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":2040,"y":440,"wires":[[]]},{"id":"dbb8c0d6c6194afc","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"set hinten","func":"flow.set(\"hinten\", msg.payload) \nreturn msg;\n","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1960,"y":520,"wires":[["95b153b4f0114ca2"]]},{"id":"ef8a22e6bcb221da","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"set hinten","func":"flow.set(\"seite\", msg.payload) \nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1960,"y":560,"wires":[["72f3f52265ea74fb"]]},{"id":"95b153b4f0114ca2","type":"file","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","filename":"pekaway/invert_hinten","filenameType":"str","appendNewline":false,"createDir":true,"overwriteFile":"true","encoding":"none","x":2140,"y":520,"wires":[[]]},{"id":"72f3f52265ea74fb","type":"file","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","filename":"pekaway/invert_seite","filenameType":"str","appendNewline":false,"createDir":true,"overwriteFile":"true","encoding":"none","x":2140,"y":560,"wires":[[]]},{"id":"6b481701f9c1297f","type":"file in","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","filename":"pekaway/invert_hinten","filenameType":"str","format":"utf8","chunk":false,"sendError":false,"encoding":"none","allProps":false,"x":1620,"y":520,"wires":[["0eef0b5eda0bb504","dbb8c0d6c6194afc"]]},{"id":"26bc12977899ca94","type":"file in","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","filename":"pekaway/invert_seite","filenameType":"str","format":"utf8","chunk":false,"sendError":false,"encoding":"none","allProps":false,"x":1620,"y":560,"wires":[["4b5ff93a116364e6","ef8a22e6bcb221da"]]},{"id":"6a4aa317707d4cfb","type":"link out","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"link out 10","mode":"link","links":["8e2d5c85106235a8"],"x":235,"y":660,"wires":[]},{"id":"8e2d5c85106235a8","type":"link in","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"link in 15","links":["6a4aa317707d4cfb"],"x":1455,"y":560,"wires":[["6b481701f9c1297f","26bc12977899ca94","0782a2000c24fc48"]]},{"id":"c6ee8b69b8f88b3a","type":"ui_template","z":"412b3e2d021f7a33","d":true,"g":"28317a609d1f9088","group":"f89e1392760d829e","name":"IMG NICK","order":3,"width":6,"height":4,"format":"<div style='width:100%; height:100%; display:flex; justify-content:center; align-items:center;'>\n <div id='image-container' style='position: relative;'>\n <img id='image-to-rotate' src='http://pekaway.local/images/van_side' style='width:230px; height:173px; transform: rotate({{msg.deg}}deg);' />\n <div id='line'\n style='position: absolute; width: 100%; height: 3px; background-color: grey; top: 96%; transform: translateY(-50%); z-index: 0;'>\n </div>\n </div>\n</div>","storeOutMessages":true,"fwdInMessages":true,"resendOnRefresh":true,"templateScope":"local","className":"","x":2930,"y":420,"wires":[[]]},{"id":"1d13fff3ca3e30ad","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"set X Achse","func":"flow.set(\"X_Achse\", msg.payload) \nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1470,"y":320,"wires":[[]]},{"id":"8321cefa88554e56","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"set Y Achse","func":"flow.set(\"Y_Achse\", msg.payload) \nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1470,"y":400,"wires":[[]]},{"id":"e5db32434873bf02","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Invert_X-Y","func":"var normal= flow.get(\"X_Achse\");\nvar invert= flow.get(\"Y_Achse\")\nvar umsch = flow.get(\"invert_X-Y\")\n\nif (umsch==false){\n msg.payload=normal\n}\nif (umsch==true){\n msg.payload=invert\n}\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1630,"y":320,"wires":[["1bf5ce9417d5b4c5","78d150ddae56107b"]]},{"id":"a9d489fc39a88f63","type":"inject","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"10","props":[{"p":"payload"},{"p":"topic","vt":"str"}],"repeat":"","crontab":"","once":false,"onceDelay":0.1,"topic":"","payload":"10","payloadType":"num","x":930,"y":400,"wires":[["8451a751463042c9"]]},{"id":"058a657c42cb14c0","type":"inject","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"5","props":[{"p":"payload"},{"p":"topic","vt":"str"}],"repeat":"","crontab":"","once":false,"onceDelay":0.1,"topic":"","payload":"5","payloadType":"num","x":930,"y":480,"wires":[["63932da30bffb350"]]},{"id":"98fb66ad79c0f7b4","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"Invert_Y-X","func":"var normal= flow.get(\"Y_Achse\");\nvar invert= flow.get(\"X_Achse\")\nvar umsch = flow.get(\"invert_X-Y\")\n\nif (umsch==false){\n msg.payload=normal\n}\nif (umsch==true){\n msg.payload=invert\n}\nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1620,"y":400,"wires":[["b16b8dc5d8ac537e","e618d524b8fb1a5d"]]},{"id":"0782a2000c24fc48","type":"file in","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","filename":"pekaway/invert_X-Y","filenameType":"str","format":"utf8","chunk":false,"sendError":false,"encoding":"none","allProps":false,"x":1620,"y":600,"wires":[["058998d6c8af7c34","bd0426ee910a4d73"]]},{"id":"058998d6c8af7c34","type":"ui_switch","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","label":"Invert_X-Y","tooltip":"","group":"4d2dbbaac32d7d9a","order":10,"width":0,"height":0,"passthru":true,"decouple":"false","topic":"topic","topicType":"msg","style":"","onvalue":"true","onvalueType":"bool","onicon":"","oncolor":"","offvalue":"false","offvalueType":"bool","officon":"","offcolor":"","animate":false,"className":"","x":1810,"y":600,"wires":[["bd0426ee910a4d73"]]},{"id":"bd0426ee910a4d73","type":"function","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"set hinten","func":"flow.set(\"invert_X-Y\", msg.payload) \nreturn msg;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":1970,"y":600,"wires":[["7ef14a1b10c7def0"]]},{"id":"7ef14a1b10c7def0","type":"file","z":"412b3e2d021f7a33","g":"28317a609d1f9088","name":"","filename":"pekaway/invert_X-Y","filenameType":"str","appendNewline":false,"createDir":true,"overwriteFile":"true","encoding":"none","x":2160,"y":600,"wires":[[]]},{"id":"4d2dbbaac32d7d9a","type":"ui_group","name":"Roll","tab":"44c44161193a7be6","order":2,"disp":false,"width":"6","collapse":false,"className":""},{"id":"f89e1392760d829e","type":"ui_group","name":"NICK","tab":"44c44161193a7be6","order":1,"disp":false,"width":"6","collapse":false,"className":""},{"id":"44c44161193a7be6","type":"ui_tab","name":"Position Sensor","icon":"fa-arrows","order":6,"disabled":false,"hidden":false}]
@Vincent ist vieleicht was für das nächste Update
Gruß
Arno